
The function of the servo motor is to convert the input voltage signal (ie control voltage) into the angular displacement or angular velocity output on the shaft. It is often used as an actuator in an automatic control system, so the servo motor is also called an executive motor. Its biggest feature is: The rotor rotates immediately when the control voltage is applied, and stops immediately when there is no control voltage. The direction and speed of the rotating shaft are determined by the direction and magnitude of the control voltage. Servo motors are divided into two categories: AC and DC.
1. AC servo motor
1. basic structure
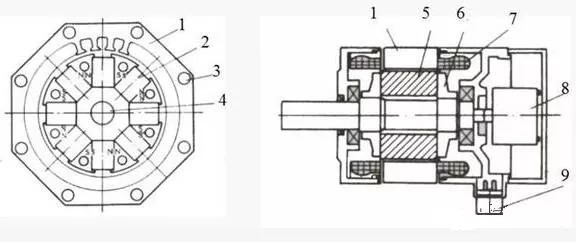
The AC servo motor is mainly composed of a stator and a rotor.
The stator core is usually laminated with silicon steel sheets. Two-phase windings are embedded in the slots on the surface of the stator core. One phase winding is an excitation winding, and the other phase winding is a control winding. The two-phase windings are spaced apart by 90° in electrical angle. During operation, the excitation winding f is connected to the AC excitation power supply, and the control winding k is added with a control signal voltage Uk.
Mainly composed of: stator 1, rotor 5 and detection element 8
2. Working principle
When the AC servo motor has no control voltage, there is only the pulsating magnetic field generated by the excitation winding in the air gap, and the rotor is stationary without starting torque. When there is a control voltage and the control winding current is out of phase with the field winding current, a rotating magnetic field is generated in the air gap and an electromagnetic torque is generated to make the rotor rotate in the direction of the rotating magnetic field. However, the requirement for the servo motor is not only that it can be started under the action of the control voltage, but also that the motor should be able to stop immediately after the voltage disappears. If the servo motor continues to rotate like a general single-phase asynchronous motor after the control voltage disappears, a loss of control will occur. We call this phenomenon of self-rotating due to loss of control as autorotation.
3. Control method
Metaphysics can use the following three methods to control the speed and direction of the servo motor.
(1) Amplitude control keeps the phase difference between the control voltage and the excitation voltage unchanged, and only changes the amplitude of the control voltage.
(2) The phase control keeps the amplitude of the control voltage unchanged, and only changes the phase difference between the control voltage and the excitation voltage.
(3) Amplitude-phase control changes the amplitude and phase of the control voltage at the same time.

2. DC Servo Motor
1. basic structure
The traditional DC servo motor is essentially an ordinary DC motor with a smaller capacity. There are two types of separately excited and permanent magnet. Its structure is basically the same as that of an ordinary DC motor.
The rotor of the cup-shaped armature DC servo motor is made of a hollow cup-shaped cylinder made of non-magnetic materials. The rotor is light and the moment of inertia is small, and the response is fast. The rotor rotates between the inner and outer stators made of soft magnetic materials, with a large air gap.
The brushless DC servo motor replaces the traditional brushes and commutator with an electronic commutation device, making it more reliable. Its stator core structure is basically the same as that of an ordinary DC motor, with multi-phase windings embedded on it, and the rotor is made of permanent magnet materials.
2. Basic working principle
The basic working principle of the traditional DC servo motor is exactly the same as that of the ordinary DC motor. The electromagnetic torque is generated by the armature current and the air gap magnetic flux to make the servo motor rotate. Usually the armature control method is adopted, that is, the speed is adjusted by changing the armature voltage while keeping the excitation voltage unchanged. The smaller the armature voltage, the lower the speed; when the armature voltage is zero, the motor stops. Since the armature current is also zero when the armature voltage is zero, the motor does not produce electromagnetic torque and does not "rotate".

Three, the difference between AC and DC servo motors
Disadvantages of DC servo motors:
a. Brushes and commutator are easy to wear, sparks are generated when commutation, and the speed is limited
b. The structure is complex, the manufacturing is difficult, and the cost is high
Advantages of AC servo motor:
c. The structure is simple, the cost is low, and the rotor inertia is smaller than that of a DC motor
d. The capacity of AC motors is greater than that of DC motors
Servo system performance requirements
1. Basic requirements
1. High displacement accuracy
Displacement accuracy: refers to the degree of agreement between the displacement of the machine tool worktable required by the command pulse and the actual displacement of the worktable converted by the servo system
2. Good stability
Stability: It means that the servo system can reach a new or return to the original equilibrium state after a short adjustment process under a given input or external interference.
3. High positioning accuracy
Positioning accuracy: refers to the accuracy with which the output can reproduce the input
4. Fast and responsive
5. Wide speed range
Speed ​​adjustment range: refers to the ratio of the highest speed and the lowest speed that the mechanical device requires the motor to provide
6. Good system reliability
7. Low speed and large torque
Second, the classification of the servo system
1. Classified by servo system adjustment theory
a. Open loop servo system

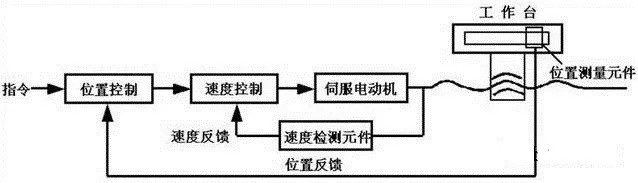
b. Closed loop servo system
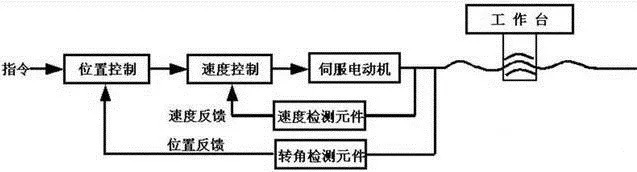
c. Semi-closed loop servo system
Solar home energy storage power supply
SHENZHEN CHONDEKUAI TECHNOLOGY CO.LTD , https://www.szsiheyi.com