
Unmanned submersible overview
Unmanned submersibles (UUV) are also known as unmanned submersibles, unmanned underwater vehicles, and unmanned underwater vehicles. UUV uses its own sensors and weapons to perform a series of important military support tasks such as remote communication relay, anti-submarine warning, underwater reconnaissance and surveillance, and anti-mine. As a maritime force multiplier, UUV has a wide range of important military uses and has an irreplaceable role in future naval battles. With the development of UUV and related technologies, UUV has been used to perform tasks such as mine clearance, reconnaissance, intelligence gathering and ocean exploration. It can also be used as an underwater weapon platform and logistics support platform in future naval battles. UUV is mainly divided into two types: remote-controlled underwater vehicle (ROV) and autonomous underwater vehicle (AUV). The cable or cable is towed behind the ROV and is controlled by personnel. AUV comes with energy, adopts autonomous control mode, flexible and convenient, and can be widely used in reconnaissance/monitoring, intelligence collection, tracking, early warning, communication relay, underwater attack and so on.
Main UAV submersible model
Since the beginning of the 21st century, more than 1,000 UUVs of various uses in more than 10 countries have been put into military or civilian fields.
UAV submersible
U.S. military UUV is at the world's leading level. In the 1990s, the United States developed a scientific and technological plan for the development of UUV, and proposed a recent development plan for the Mine Reconnaissance System (NMRS) and the Long-Range Reconnaissance System (LMRS), among which NMRS was in 1998. In the year, it was officially served as a standard equipment for attacking nuclear submarines. In 2000, the US Navy proposed the development plan for UUV before 2030. The plan identifies seven missions of UUV for military applications (intelligence/surveillance/reconnaissance (ISR), anti-mine (MCM), meteorology and oceanography, auxiliary communications and navigation, anti-submarine warfare (ASW), autonomous weapons platforms , logistical support and replenishment) and four operational capabilities (maritime reconnaissance capabilities, underwater search and measurement capabilities, auxiliary communication/navigation capabilities and submarine tracking and tracking functions), depicting the development blueprint for UUV before 2030. In 2004, the US Navy announced a new UUV development plan, proposing nine missions, including intelligence/surveillance/reconnaissance (ISR), anti-mine measures, anti-submarine warfare, observation and identification, oceanography, communications, and navigation network nodes ( CN3), load transport, intelligence warfare and time sensitive target strike (TCS).
UUV of the US Navy's future unmanned fleet
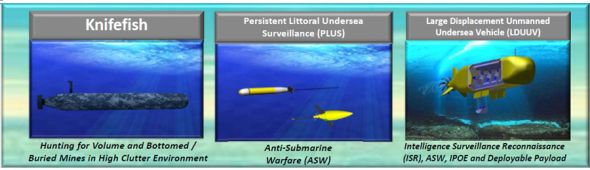
In order to accomplish the above-mentioned multi-faceted maritime combat missions, the US military has proposed the development of four different levels of UUV.
The small portable UUV, which is only between 70 and 230 mm in diameter and weighs less than 45 kg, can be launched from various small launch tubes of submarines, such as from the launch tubes of sonar buoys and underwater acoustic countermeasures. Its range is only around 10 nmile, and the working time is in the range of 10 to 20 h. Such UUV-executable tasks are: intelligence, surveillance and reconnaissance, shallow waters anti-mine, surveillance and lightning, and one-time communication/navigation network nodes.
Light UUV, with a diameter of 324mm, can be launched and recovered by the active light torpedo equipment. The continuous working time can reach 20~40h, mainly completing the port information search, surveillance and reconnaissance, reconnaissance of the mine area, as mobile communication / Nodes of the network, as well as collecting marine information.
Heavy-duty UUV, with a diameter of 533mm, can be launched by the active submarine torpedo tube, with a weight of more than 1000kg, and can work continuously for 40-80h under low load. Its tasks include tactical intelligence gathering, surveillance and reconnaissance, anti-mine, and as a submarine. The simulator tricks enemy torpedoes and so on.
The large UUV has a diameter of about 1m, a displacement of up to 10t, and can work for 100 to 300h under high load. This UUV is suitable for installation on most US attack-type nuclear submarines. Its mission is to continuously conduct intelligence search, surveillance and reconnaissance missions, special operations and emergency missions, mine warfare and anti-submarine warfare.
Here are a few common UUVs.
1 giant UUV - Manta
MANTA is a giant UUV that was developed in the United States at the beginning of this century. The following picture shows the "Manta I" unmanned submersible under test. It is usually part of the submarine, and it can be used on the submarine or left the submarine to complete the combat mission independently. After completing the mission, you can return to the parent boat to accept the new mission. The US Navy plans to load four MANTAs on future submarines. Each MANTA can be loaded with weapons such as torpedoes, missiles, or mines. Its modular design changes its configuration at any time depending on the task. MANTA is usually conformed to the submarine and installed in the crotch of the boat. At this time, the submarine can directly use MANTA's weapons and sensors. When MANTA leaves the mothership to complete the task independently, the original MANTA position is filled to ensure that the submarine's hydrodynamic characteristics and noise characteristics are not greatly affected.

MANTA test chart
The initial design of MANTA is up to 50 tons each, and each MANTA can carry 4 heavy torpedoes. Another important feature of MANTA is its advanced underwater sensors and the use of many state-of-the-art technologies such as piezoceramic transmitters, high-pressure hydrophones, high-density multi-channel recorders, boat-borne electronics and advanced Processing algorithm. MANTA's speed is 4.5-10kn, with high-precision navigation capability, underwater acoustic communication and radio communication capabilities, and low-speed navigation. Seabed topography and depth can be obtained by equipped side-scan sonar, with the ability to detect mines and obstacles, providing the mother boat with detailed information on the numerous underwater combat spaces. Launching weapons from MANTA is a key technology being addressed. In short, MANTA can accomplish a variety of tasks undertaken by UUV, especially in the shallow waters to carry out underwater attacks to the enemy.
2 American Bluefin Series UUV
Bluefin Robotics has produced about 50 AUV platforms in the series, including 21-inch (533mm) BPAUV mounted on the US Navy surface ship, 9-inch for VSW (very shallow sea) and MCM (anti-mine warfare). The 229mm) portable Bluefin-9 system, and the Bluefin-12 (324mm) system for flexible use and operation.
Features of the series: precise navigation after dive, long distance through the operating area; in place waiting for instructions or explosion threats; flexible payload capacity; balance between load and UUV size; stable at 0.5-5kn speed Sensor platform.
When Bluefin is used as a reconnaissance aircraft, it undertakes a series of observable tasks, including:
(1) transporting supplies to swimmers on shore, on boats, or in water;
(2) intercepting and tracking targets;
(3) Information acquisition, surveillance and reconnaissance (ISR) on the coast, seafront and port;
(4) Communication links between shore personnel and facilities on the sea.
It is mainly used for port security and MCM.
(1) Port security: UUV is used to monitor and reconcile intruders (firstly, the aircraft is anchored on the seabed as much as possible, and its sensors are used to detect intruders. When an intruder is detected, the aircraft reports the detection results and intercepts the intruders or trails. The sensor can be precisely positioned for the intruder and can be contacted by the port).
(2) MCM: 1) establishment of seabed imaging; 2) survey; 3) intelligent database - determining the location and extent of possible minefield waters; 4) similar mines, potential buried mine locations and densities; Sound and magnetic propagation characteristics within a geographical range.
Bluefin's AUV has the ability to run a fairly long path from the deployment point, perform submarine imaging and return to the original path. When these capabilities are implemented in MCM operations, they are completely concealed.
(1) Bluefin-9
In 2006, the Bluefin-9 UUV was put into use for anti-mine and shallow sea surveys. Its small size makes it easy to operate and operate, maintains the forward direction and can be quickly turned in the dive to achieve an optimum exploration rate. The system was designed to allow two people to operate UUV on a small boat, including downloading new probe data, replenishing energy, and configuring new tasks; all of which can be completed in less than 15 minutes.
Sonar imaging played back with Bluefin's view software, including a waterfall map, a waterfall map and a chart (UUV track, current location and all contact locations). Bluefin-9 features: rapid reversal in water; simple operation; modular and field maintainability; precise navigation.
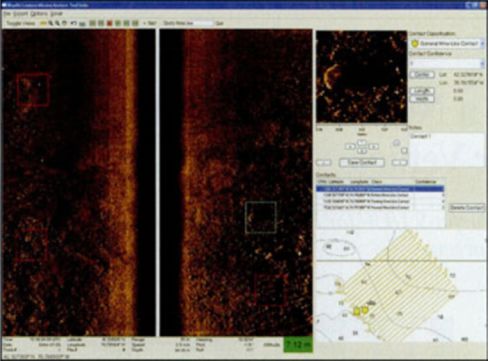
Bluefin's View Software Review Sonar Imaging
The Bluefin-9 has four modules: the main electronics compartment, pressure-resistant batteries, data modules and hinged duct thrusters. Bluefin's View Software Review Sonar Imaging is shown below.
The complete software includes: Bluefin's mission plan, Dash-board and user's data analysis interface, which do not require much training for the operator. When launched, the mission plan appears in front of the user in the form of a chart. The task file obtained by the operator can tell the UUV speed, depth, sonar beam width, route spacing, and walking length and distance. When the module is implanted in the aircraft, the UUV can begin its mission. Any kind of task can be pre-set to the data module, so the operator does not need to do the program settings for the task on the boat. A task can be set up in 5 to 10 minutes. Its core software is also applied to Bluefin-21.
(2) Bluefin-12
Bluefin-12 provides users with a platform with load flexibility and capabilities unmatched by similar products. Maximizing payload and performance with intelligent packaging with cutting-edge technology similar to light torpedo structures.
In August 2006, the US Navy signed a contract to complete a UUV-based mine detection system by Bluefin. Each SMCM/UUV-2 system consists of two Bluefin-12UUV platforms and all auxiliary equipment that needs to operate and maintain the system. Each Bluefin-12 UUV carries a dual-frequency synthetic aperture sonar as its primary sensor, as shown in the figure below. Bluefin-12 features: simple operation; strong endurance; strong load capacity.

Bluefin-12
(3) Bluefin-21
In September 2005, the US Navy signed a contract to complete the UUV mission for the coastal surface ship by Bluefin. The mission module consists of two Bluefin-21 robots and includes all the necessary equipment to operate and maintain the aircraft. The module includes communication systems, battery charging stations, tail cone parts, and human factor structural changes. This program provides an opportunity for the Bluefin-21 platform to evolve from the ONR (Naval Research Bureau) trial design to the successful transition of the Operational Platform of the Bohai Battleship (LCS). Bluefin-21 features: reconfigurability and customizability; reliability; flexibility; high resolution; precision navigation.
Outstanding sonar imaging (the standard configuration of the Bluefin-21 can carry a high-performance 455 kHz side-scan sonar, horizontal track provides 10 cm resolution, and vertical track provides 7.5 cm resolution. Bluefin's high-resolution sensors and unique precision navigation allow the Bluefin-21 to find mines within 8 square miles per dive, which is unmatched by other devices.
Precise navigation (Bluefin-21 high-performance and self-contained navigation system does not require the use of sonar buoys. The submersible can fuse AHRS (Azimuth Azimuth Reference System) and DVL (Doppler Logging) when diving and regularly floating GPS data updates. The data of this navigation system has excellent navigation performance. In the US Navy's exercise, Bluefin's positioning of the target is within 3m radius.
(4) BPAUV
BPAUV (Battlespace-Preparation AUV) is a small fast underwater robot developed by Bluefin Robotics. It is a key part of the LCS mission module and provides important intelligence, surveillance and reconnaissance capabilities for mine warfare and other missions. The BPAUV uses a low-resistance fairing with a single hinged duct thruster that can be operated from a ship or boat.
In addition, the 455kHz side-scan sonar on the submersible provides an image with a resolution of 7.5-10cm. Under the contract, the US Navy will purchase a BPAUV system, including two submersibles and support equipment. The BPAUV weighs 800 pounds, is 122 inches long and 21 inches wide. It is powered by a lithium battery and runs at 3kn. Once deployed from a mine warship, it is completely autonomous to sail according to a pre-designed route. The BPAUV features side-scan sonar to detect and identify mines in front of the ship.
The main parameters of BPAUV include: total length: 305cm; diameter: 53cm; weight: dry weight 220kg; wet weight 360kg; working depth: 270m.
Features of BPAUV:
1) Flexibility: As shown in a series of fleet combat experiments, the Bluefin-21 BPAUV secretly collects accurate marine biodistribution and seabed classification data for use in the early stages of battlefield space preparation. It can operate in a variety of climatic conditions, regardless of day or night, without loss of data accuracy, can be deployed from a small boat of not less than 40 feet.
2) Precise navigation: BPAUV can provide 0.5% navigation accuracy without assistance in real time, and the navigation accuracy after post-processing can reach 0.2%.
3) Wide range of operations: Bluefin's unique battery mode allows fast reversal on the deck for up to two hours, eliminating the need to open the pressurized chamber to exchange batteries. The full-load battery provides the submersible with the capability required for a survey of 18h at a speed of 3kn per hour, with a working range of up to 150km in a water depth of 200m. The Bluefin operator's intuitive software makes the adaptation process fast and precise.
3 mission reorganization unmanned submersible
Since the "long-term mine reconnaissance system" (a cable-free autonomous unmanned submersible) needs to be pre-programmed, only one type of task can be performed at a time, and the cost is too high. The United States terminated the follow-up of the project in 2008. Research and development work. Subsequently, the US Navy focused on the development of “reconstructed unmanned submersiblesâ€.
The “reorganized unmanned submersible†consists of two parts, the basic part and the task payload part. Among them, the basic part includes propulsion devices, batteries, navigation equipment, communications, electronic equipment, control equipment, obstacle avoidance equipment, deployment and recycling equipment, and equipment that guarantees the task of reorganizing unmanned submersibles for basic navigation functions. The payload portion is primarily a number of specific devices that are integrated with the basic parts of the mission reconfigurable unmanned submersible to perform the required tasks.
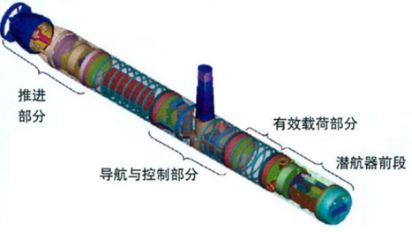
Task reorganization unmanned submersible structure diagram
4 Undersea System of the National Defense Research Institute - Hydra
The United States Defense Advanced Research Agency (DARPA) is preparing to develop an underwater mothership that can quickly resupply and equip naval personnel on nearshore facilities, submarines or surface ships or even aircraft. The project, called Hydra, is still in the early stages of planning. In August 2013, the US Defense Research Institute held an industrial briefing at the Johns Hopkins University Applied Physics Laboratory to solicit defense contractors. Design a plan to put this idea into practice.
At the meeting, the US Defense Research Institute elaborated on the project's goal of developing and demonstrating a UAV/UAV work network that should be able to transport, mount, launch or deploy multiple payloads, including no one. Aircraft, unmanned submersibles, etc. In the paper of the industry briefing, the project management department said that more and more intense piracy and the complexity of the defense system continue to dilute the naval resources, making the navy lack of energy to perform special operations and emergency tasks. The agency said it hopes to develop a mothership that launches small drones into the air through the Water Margin project and can be used in actual combat.
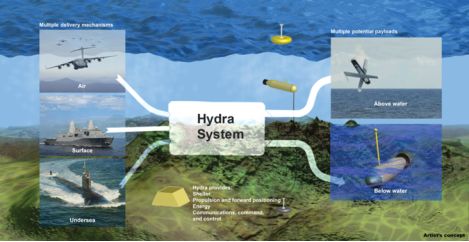
"Hydra" concept map
Through remote control, unmanned boats can deploy drones, which sounds a bit like science fiction, but it may be the form of future war. Similarly, the US Defense Research Institute is working with Lockheed Martin to develop drones that can transport equipment, cars, and even soldiers' cabins to land and air.
Similar to Lockheed's drone project, the Mink project is also designed to store and transport different types of loads using modular, standardized cabin structures. The US Defense Research Institute told reporters that under ideal conditions, the "Water Margin" unmanned boat/UAV can last for several weeks or even a month. The US Defense Research Institute hopes that this unmanned boat/unmanned aerial vehicle system will be able to demonstrate actual combat functions by 2018.
In addition to an unmanned underwater system development and demonstration, the program will provide a new delivery mechanism for deploying unmanned aerial and underwater vehicles. By using a payload module in a standard enclosed space, the "Water Margin" program will allow for scalability and provide a quick response to the Navy's cost-effective underwater installation.
“The driverless technology infrastructure, working under the ocean surface, can alleviate some of the resource pressure.†Modular payloads will provide key functions such as intelligence, surveillance, reconnaissance (ISR) and anti-mine (MCM).
“It is foreseeable to operate across the air, underwater and surface, and to fulfill its mission in all three spaces,†Little said.
The “Water Margin†communication kit will enhance the effectiveness of the manned platform and will also enable remote control to significantly increase operational range from over-the-horizon.
The manned platform of the "Water Margin" can also provide some new functions for the manual operating platform, such as the deployment of an onboard ISR with an expandable platform or an ISR charging hub for a submarine vehicle.
Development of UUV in France
At the beginning of this century, France has provided about 350 ROVs for mine destruction in 14 countries. In recent years, they have proposed a new reconfigurable multi-purpose anti-mine device based on the Ultraster UUV, which is mainly military anti-mine, but when used in other military or civilian applications. Nearly 90% of its equipment is still applicable.
France has always had advanced technology in the field of anti-mine warfare. At the end of 2008, the French Naval Armaments Agency required the use of innovative UUVs to replace the fleet's 13 minesweepers, which may cost more than submarines. DCNS has obtained a contract for the technical transformation of these minesweepers. TUS has undertaken the design task of the anti-mine system and UUV from DCNS. The research is scheduled to be completed in July 2010.
The core technology used by TUS is the use of an autonomous UUV that separates it from the mother ship, so the mother ship no longer requires a specially designed minesweeper and the cost can be greatly reduced. This new generation of UUV for lightning protection has reached a new level compared with the ROV for lightning used in design 10 years ago. This is a true unmanned mine-sweeping technology.
French ECA companies claim that their fully autonomous UUV, called Alister, can perform tasks such as surveillance and mapping at 3000m underwater. Future high-performance fuel cells allow Alister to sail underwater for more than a dozen hours.
Development of UUV in Japan
Japan has invested in the development of UUV technology around the 1990s. The main research areas include: high-performance batteries, pollution-free propulsion systems, efficient heat engine technology, high data rate underwater acoustic communication technology, and low cost. Terrain matching and precision navigation technology, low noise and low electromagnetic sensor technology, coating stealth technology, artificial intelligence to control UUV, neural network and fuzzy logic, high reliability and low maintenance technology. The following picture shows the Twin-Burger 2 underwater robot and the PTEO-ROA 25 underwater robot developed by the University of Tokyo.
Key technology of underwater combat platform
At present, all countries in the world are actively developing underwater unmanned platform technology. Especially in recent years, with the rapid development of computer technology and communication technology, the introduction of these high-tech technologies in the field of underwater unmanned platforms has greatly promoted the development of unmanned platforms in the water. process. The unmanned platform in the water is the main carrier of the unmanned combat platform in the water, and its development determines the technical level of the underwater combat platform. The development of unmanned platforms in the water is a multi-disciplinary problem. From its overall framework to its hardware and equipment, to its supporting software technology, it needs corresponding science and technology to support it. The following is an analysis of the key technologies needed to develop an unmanned combat platform in the water.
1 task module technology
The purpose of developing an unmanned combat platform in water is to use it to perform a variety of tasks, and its mission determines its purpose and function. If you build a dedicated unmanned combat platform for a simple task, it would be a waste of resources. If you classify various tasks and then build corresponding task modules according to the needs of the tasks, these modules can perform different tasks in different tasks and freely disassemble them on the platform, which will greatly improve the unmanned combat platform. Versatility while reducing overall construction costs.
The development of task module technology begins with the design of the structure of the carrier and establishes a standard for the entire modular system. The overall structure should be suitable for the replacement of the module, and also should be suitable for the basic structural requirements of the navigation body, such as the pressure requirements of the overall structure, watertight performance, load and other basic conditions must be met. And as much as possible, use standardized interfaces in the entire structure to facilitate access to other devices and modules. The equipment in the module should use a device with good compatibility, which is beneficial to the replacement of the new device, and the scalability is also better.
2 highly intelligent
Due to the complexity and unpredictability of the underwater working environment, the underwater combat platform system should continuously improve and improve its own intelligent architecture, strengthen the system's ability to cope with change, and enhance the system's ability to learn independently. The combat platform has better autonomy and adaptability. The autonomy and adaptability of the unmanned combat platform in the water is mainly determined by the system's artificial intelligence technology, integrated control technology and the performance of the software system. At present, artificial intelligence technology is mainly artificial neural network technology and symbol-based reasoning technology. Both technologies have their own advantages and disadvantages. Therefore, combining the two technologies to develop and utilize can improve the learning and adaptability of the system. For system software design and system integration control, many countries are conducting research and development, mainly focusing on the following aspects: fusion and identification of multi-sensor information, software architecture with good compatibility, closed-loop motion control technology for submersibles, etc. Wait.
3 power propulsion and energy development
The current working range of unmanned combat platforms in water is greatly affected by power energy. The endurance determines the scope of their work, and the efficiency of energy determines their dynamic performance. The current speed of unmanned combat platforms is generally low, generally within 10 knots, and the working range is relatively small, and the working time is short, which is limited by the dynamic performance. Therefore, it is necessary to improve the capabilities of unmanned combat platforms and improve their dynamic performance. At present, the energy of most unmanned platforms in water is mainly: silver-zinc batteries, lithium batteries, alkaline batteries, aluminum-oxygen semi-fuel cells, etc. Although these batteries are widely used, they all have certain deficiencies. In order to improve the endurance of unmanned combat platforms, new energy sources with higher power generation efficiency, higher cost-effectiveness, and reusability should be developed to improve their dynamic performance.
4 navigation and positioning technology
The detection and navigation equipment on the unmanned combat platform in the water is the "eye" of the platform. The platform relies entirely on the information collected by the detection and navigation equipment for navigation and positioning when working in the water. Navigation technology plays a crucial role in the ability of unmanned combat platforms to navigate to designated locations for operations and to perform assigned tasks. At present, navigation devices for unmanned combat platforms in water mainly include inertial navigation systems, GPS systems, and Doppler speed meters. At present, the unmanned combat platform in the water adopts a multi-technology combination navigation method, that is, the GPS positioning system is combined with the underwater acoustic wave positioning method for positioning, and the inertial navigation system, the Doppler speedometer, the Kalman filter, and the like are utilized. Navigate with sonar and image data captured by the camera. However, there are still some shortcomings in data fusion of various devices, and it is necessary to continue to improve. At the same time, some countries are developing new navigation technologies, such as submarine terrain matching navigation and gravity magnetic navigation technology, which are new directions for developing navigation technology.
5 communication technology
The communication of unmanned combat platforms in the water is the main way of information exchange between multiple platforms. At present, the communication methods of underwater unmanned combat platforms mainly include underwater acoustic communication and optical fiber cable communication. Among them, optical fiber cable communication belongs to wired communication, which uses cable and optical cable as transmission medium to transmit information. It is characterized by transmitting signals. Fast and reliable, but the need for fiber optic cables and cables to connect two work units, which limits the scope and flexibility of the platform in the water; underwater acoustic communication is a wireless communication method, and its working distance depends on the equipment used. Carrier frequency and transmission power, its transmission speed is relatively low, the distance of transmitting information is also very limited, and underwater acoustic communication is also greatly affected by the environment. The study of underwater acoustic communication is currently the focus of development in various countries. They mainly focus on the research of high-speed underwater sound transmission, long-distance transmission technology and transmission security. At present, the United States has also successfully developed the use of lasers for communication in water. The main use of blue-green lasers is to communicate with underwater submersibles of about 100 meters in depth through airborne units, but there is still a certain distance from the application to the underwater combat platform. distance.
6 deployment and recycling technology
The deployment and recycling of unmanned combat platforms in the water is also a technology that cannot be ignored in the study of underwater platforms. At present, the unmanned combat platform in the water mostly adopts the technology of submarine deployment, which can not only expand the range of activities of the unmanned combat platform in the water, but also maintain its concealment. Countries have relatively few studies on the design and recovery methods of recovery devices for underwater platforms, and progress has been slow. The United States has conducted a lot of research in this area and conducted a series of experiments.
For example, in the "São Paulo-Minneapolis" (SSN-708) attack-type nuclear submarine in 2005, the AN/BLQ-11 mine detection system was installed, and the deployment and recovery experiments were carried out in the developed sea area, and it was successful. Solving the problem of deployment and recycling of unmanned combat platforms will greatly improve the efficiency of UUV use.
7 platform collaboration technology
The multi-water unmanned combat platform collaborative combat technology emerged as a new application method for unmanned platforms, which has received much attention from many countries. Multi-unmanned combat platforms work together to accomplish tasks that are more reliable and faster, but that are difficult to accomplish on the platform. The collaborative work of multiple platforms involves communication interactions, information fusion, collaborative control, etc. between various platforms. The following key technologies are analyzed.
1. Architecture issues with multi-platform systems
The structure of a system composed of multiple underwater unmanned platforms is very complicated. It is not only to simply assemble multiple platforms to form a whole, but to establish a reasonable and effective system architecture so that each platform can fully utilize them. The respective performances make the sum of the overall performance of the system greater than the sum of the performance of each platform. Choosing the right architecture is the premise of studying the whole unmanned platform system. Its structural framework and control mechanism determine the composition and function of the whole system and are the basis of the whole system. The structure research of multi-platform system mainly includes two aspects: one is the structure of a single platform in the system, but the organizational structure among multiple platforms. These two aspects are also the two main directions for future research on multi-platform systems.
2. Sensor management technology
Multiple underwater unmanned combat platforms can carry a variety of different sensors, and multiple sensors can be used to detect when collaboratively performing tasks, and then the information collected by each sensor can be integrated to obtain more and more comprehensive detection information. So how to coordinate the management of these sensors and make full use of the information resources they collect is a key technology to study multi-platform collaborative work. When multiple platforms work together, the communication network can be used to share the information collected by each sensor to each unit in the network, which can expand the detection range of the entire system and improve the observation capability of each platform. The rational allocation and management of these sensors will greatly enhance the operational capabilities of the entire multi-unat platform system. Sensor management includes space management, time management, and pattern management. For the management of the sensor, the task of the sensor is reasonably planned according to the task of the operation, that is, the assignment of the sensor and the assignment of the task are determined according to the content of the task; then the control commands are used to guide each sensor to complete the task.
3. Underwater communication network technology
The underwater acoustic communication network technology is the key technology for the construction of the entire unmanned platform system in multiple waters, and it is also the main direction of research in many institutions. Whether a multi-water unmanned combat platform can successfully form a coordinated combat system and whether it can successfully complete a given mission depends on whether it has a good underwater acoustic communication network technology. Due to the complex and varied underwater environment, underwater communication is subject to many restrictions. The transmission distance, transmission efficiency and reliability of underwater acoustic communication, which is the main means of underwater communication, are affected by the underwater environment. Therefore, a well-designed communication scheme and a reasonable underwater network structure are all incompatible with underwater acoustic communication. The necessary method. These issues require further research.
4. Intelligent coordination and control technology
When a multi-water unmanned combat platform performs tasks together, how to manage multiple units and how to coordinate work between multiple units requires effective coordination and control techniques. The management of these collaborative units involves the assignment of tasks, solutions to resource conflicts, coordinated control solutions, etc. A reasonable solution to these problems will enable the overall system resources to be properly configured and coordinated between the various units. The performance has been greatly improved.
The purpose of researching intelligent coordination and control technology in the entire multi-platform system is to enable multiple platforms to be combined into one whole, in which coordination work can be coordinated. The need for multiple unmanned platforms to work together smoothly is a clear way of organizing, and the proper operation of movement and work in a coordinated manner is required. Only by solving these two basic points can we truly improve the level of coordination and control technology of multi-platform systems.
5. Multi-underwater platform data fusion technology
The most obvious advantage of the multi-water unmanned platform combat system is the ability to share the information of sensors from multiple platforms to the various units in the entire system, making the battlefield more transparent. How to integrate the information shared by multiple combat platforms to form information data that can be recognized by each platform is a problem that must be solved to realize information sharing. This problem involves the consistency of data description, multi-data fusion technology, computer database technology and information filtering technology, which are the key to solve this problem. For homogeneous systems, they use the same detection device, which is easier to solve on this problem; however, for heterogeneous systems, the structure of multiple platforms in the system is different, and the information patterns collected by the devices used are It is also different how to combine the data information of multiple modes to form data that can be recognized by all platforms is a problem that must be solved. At the same time, the underwater special environment also creates a lot of trouble for data transmission in the water, which has become a great difficulty for data fusion of multiple underwater unmanned combat platforms.
CL-2H Copper Connecting Terminals
Our company specializes in the production and sales of all kinds of terminals, copper terminals, nose wire ears, cold pressed terminals, copper joints, but also according to customer requirements for customization and production, our raw materials are produced and sold by ourselves, we have their own raw materials processing plant, high purity T2 copper, quality and quantity, come to me to order it!
CL-2H Copper Connecting Terminals
Taixing Longyi Terminals Co.,Ltd. , https://www.lycopperlugs.com