
An acceleration sensor is a sensor that measures acceleration. It usually consists of mass, damper, elastic element, sensitive component and adaptive circuit. During the acceleration process, the sensor obtains the acceleration value by using Newton's second law by measuring the inertial force of the mass.
Acceleration sensor characteristics1, sensitivity
The sensitivity of an acceleration sensor is the ratio of its output signal amount (voltage/charge) to the input signal amount (acceleration). The higher the sensitivity, the larger the signal-to-noise ratio, and the smaller the electrostatic interference and electromagnetic interference noise. However, under the premise that other conditions are the same, in order to obtain higher sensitivity, a larger mass is required, which brings two disadvantages: the acceleration sensor becomes larger in mass and the resonance frequency becomes lower.
2, quality
The accelerometer is usually fixed to the surface of the object by screwing or gluing. If the dynamic mass of the accelerometer is close to the dynamic mass of the object, this part of the mass will affect the object to be tested. The state of motion, resulting in a measurement with a certain degree of distortion. Therefore, when the measured object is relatively thin and light (circuit board, housing, etc.), especially attention should be paid to the use of an acceleration sensor of small mass.
3, resonant frequency
The acceleration sensor itself is a spring-mass-damping system, so there must be a resonant frequency. If the vibration frequency of the measured object is close to this resonant frequency, the sensitivity of the acceleration sensor will increase sharply, and the output value is meaningless. In general, accelerometers operate in the 1/5 or 1/3 band of their resonant frequency.
4, frequency response
The frequency response of an accelerometer usually refers to its amplitude response. The frequency response of an ideal accelerometer is of course the same sensitivity from 0 Hz to + Hz, but there is actually no such sensor. Accelerometers differ according to their working principle. Some perform well in high frequency bands and can reach tens of kHz. Some have better low frequency response and can provide DC response.
5, lateral sensitivity
Ideally, if the measured object has vibration perpendicular to the direction of the acceleration sensor's measuring axis, the output measurement signal should be zero. However, in reality, up to 5% of the output signal may be due to material characteristics and manufacturing errors. This is a crosstalk output, so lateral sensitivity is also known as "crosstalk sensitivity."
6, temperature sensitivity
The acceleration sensor is an electronic product whose output characteristics are inevitably affected by temperature. Generally speaking, the higher the temperature, the larger the measurement error, but the temperature compensation can be performed. The temperature range of different types of accelerometers varies widely. For example, PE sensors can withstand 700 °C, while IEPE sensors can only withstand 175 °C due to built-in processing circuits.
7, transient temperature sensitivity
The acceleration sensor produces an output as a result of temperature transients. The ratio of the maximum value of the output to the product of sensor sensitivity and temperature change is called transient temperature sensitivity. The error introduced by this transient temperature mainly occurs in the piezoelectric acceleration sensor and is caused by the pyroelectric effect. In most cases this effect is very low frequency and is not easily found.
The acceleration sensor naturally detects the acceleration of its own device. The physical implementation of its own is not to be developed. It is conceivable that there is a vacuum region inside the chip, in which the sensing device is located, which causes a voltage change due to the inertial force and gives a quantized value through the internal ADC.
Lis3dh is a three-axis accelerometer, so it can detect X, Y, Z acceleration data, as shown below:
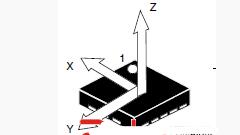
In the static state, the sensor must act in one direction of gravity, so the data of one axis is 1g (ie, 9.8 m / sec twice). In practical applications, we do not use the calculation method related to 9.8, but use 1g as the standard acceleration unit, or use 1/1000g, which is mg. Since it is an ADC conversion, there is definitely a concept of range and precision. In terms of range, Lis3dh supports (+-) 2g/4g/8g/16g. Generally, as a step-by-step application, 2 g is sufficient, and 1 g of acceleration can be detected by removing 1 g of gravitational acceleration. As for the precision, it is related to the number of registers used. Lis3dh uses two 8-bit (16-bit total) registers to access the current reading of an axis. Since there are accelerations in both directions, the 16-bit number is a signed integer and the actual value is 15 bits. Calculated by the (+-)2g range, the accuracy is 2g/2^15= 2000mg/32768 =0.061mg.
When the static state shown in the above figure, the positive direction of the z-axis will detect 1g, and the X and Y axes will be 0. If the position is adjusted (such as the screen of the mobile phone is flipped), there will always be one axis that will detect 1g, and the other axis will be 0. In the actual measured value, it may not be 0, but has a subtle value.
The x, y, and z axes change during the movement. The stepping movement also has its inherent numerical law, because the stepping process also has the regular process of lifting the foot and releasing the foot, as shown in the following figure. "The ankle is off the ground is the beginning of a step. At this time, due to the reaction force of the ground, the vertical acceleration begins to increase. When the foot reaches the highest position, the vertical acceleration reaches the maximum; then the foot moves downward and the vertical acceleration begins to decrease. Until the foot touches the ground, the vertical acceleration is reduced to the minimum. Then the next step is taken. The forward acceleration is generated by the friction between the foot and the ground, and the feet increase when they touch the ground, and decrease when the foot touches the ground."[Here is quoted in Korean "Pedometer Design Based on Acceleration Sensor LIS3DH" by Zheng et al.

1. Perform motion detection at rest
Use the OR circuit to work, set a small motion threshold, and only detect whether the X and Y axis data exceeds the threshold (the Z axis has 1g at this time, regardless of the axis). As long as the data of any axis of X, Y exceeds the threshold for a certain period of time, the device is considered to be in the wakeup state.
2, weight loss detection
When the weight is lost, the Z-axis acceleration and the gravitational acceleration cancel, and will be 0 in a short time, and the X and Y axes do not change, so all three are 0 in a short time. Here, the AND circuit is used to set a small motion threshold. When the data in all three directions is less than the threshold for a certain period of time, it is considered to be weightless.
3, position and posture recognition
Application scenarios such as cell phone flipping use this feature. I have already made it very clear when I explained the working principle in the third part.
With the above understanding, you can use the LIS3DH to directly find the register to fill in the value to complete the function.
Common MEMS accelerometer chip inventoryMMA7260, Freescale's sensitivity, 6g (200mV/g), 4g (300mV/g), 2g (600mV/g), 1.5g (800mV/g) adjustable, the most commonly used 3-axis accelerometer. The noise is terrible and used with caution.
ADXL335, AD, sensitivity 3g (300mV / g), but the noise is very small, 12-bit sampling, then the noise is plus or minus 1LSB.
I have used both of the above accelerometers. Personally think that it is best to use low noise, small sensitivity can be amplified, noise is not good. Of course, RC low-pass filtering is also possible, but the noise is full-frequency white noise, and if the low-pass frequency of the RC filter is too low, the response speed is lowered.
There are also MMA7455, ADXL345, which can be said to be the above two I2C, SPI digital output version, not used; and ADXL203, the noise is very small and very sensitive, but it is two-axis, 90+RMB.
If you need the DATASHEET of the above chips, the English version of the google search model is generally the first search result with [PDF] is the corresponding DATASHEET.

Insulated Copper Tube Terminals
Insulated Copper Tube Terminals,High quality insulated terminal,copper tube terminal
Taixing Longyi Terminals Co.,Ltd. , https://www.lycopperterminals.com