
How do driverless cars achieve automatic driving? One of the key technologies behind this is LiDAR, the laser radar sensor, commonly known as the light, which is also known as the eye of a driverless car.

Lidar, English full name Light Detection And Ranging, referred to as LiDAR, is light detection and measurement, is a system that integrates laser, global positioning system (GPS) and IMU (Inertial Measurement Unit). Used to obtain data and generate an accurate DEM (Digital Elevation Model). The combination of these three technologies can highly accurately locate the spot of the laser beam on the object, and the ranging accuracy can reach centimeter level. The biggest advantage of the laser radar is "precision" and "fast and efficient operation". It is a sensor for accurately obtaining three-dimensional position information. Its function in the machine is equivalent to the human eye, and it can determine the position, size, external appearance and even material of the object.
LiDAR determines the distance by measuring the time difference and phase difference of the laser signal, and measures the angle by horizontal rotation scanning or phased scanning, and establishes a two-dimensional polar coordinate system based on the two data; and obtains the third three-dimensional by acquiring signals of different elevation angles. Height information.
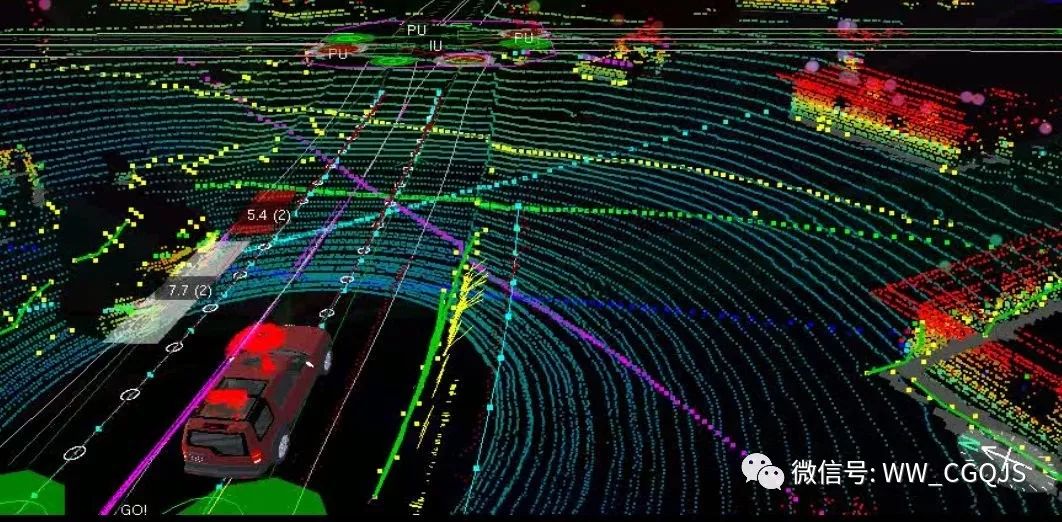
High-frequency lasers can acquire a large number (106-107 orders of magnitude) of position point information (called a point cloud) in one second and perform three-dimensional modeling based on this information. In addition to obtaining positional information, it can also initially distinguish different materials by the reflectivity of the laser signal.
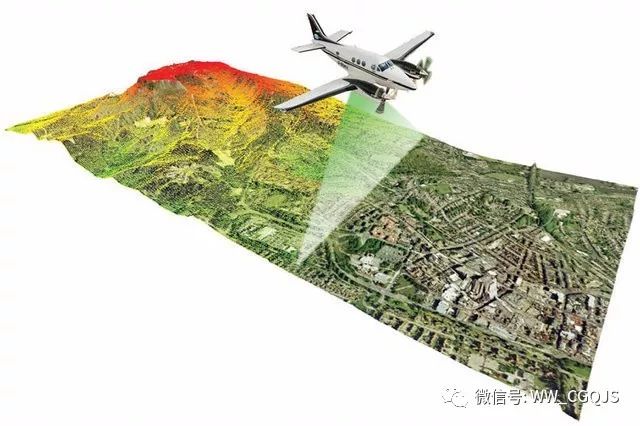
Lidar is the key technology for autonomous drivingLidar is broadly divided into airborne and ground applications. Airborne laser radar is an airborne laser detection and ranging system installed on an aircraft that can measure the three-dimensional coordinates of ground objects. As early as the 1970s, developed by NASA, the LIDAR mapping technology's no-load laser scanning technology began to develop, and the speed was fast, and commercialization began in about 1995.
In addition to military applications, laser radar is rapidly expanding into the civilian market. Among them, driverless can be said to be one of the most popular applications.
Applying Lidar to autonomous driving goes back to the US DARPA (United States Defense Advanced Research Projects Agency), which hosts the Driverless Car Challenge every year. In the 2007 DARPA Challenge, 6 of the 7 teams participated. They used the Lidar designed by Velodyne, and the first two were from the six teams. This caught the attention of Google, which was preparing to develop a driverless car. After that, Google formed a team, and it was said that the original personnel came from these players. Google launched the driverless car project in 2009, and Velodyne's Lida was used in its prototype.
Lidar application in the unmanned vehicle marketIn recent years, the market for driverless cars has been booming. After Google, mainstream R&D teams such as Baidu and Uber are using laser radar as one of the sensors, which is used in conjunction with image recognition technology to make the car achieve road conditions. judgment.
Traditional car manufacturers have also begun to develop driverless cars, including Volkswagen, Nissan, Toyota and other companies are developing and testing driverless car technology, they also use laser radar.

The Lidar system measures the distance and direction of each pixel in the 3D space to the transmitter, creating a real-world complete 3D model through the sensor. The basic method of operating a Lidar system is to emit a beam of laser and then measure the signal that the light reflects back on the surface of the object. The time required for the Lidar module to receive the reflected signal provides a means of directly measuring the distance between the Lidar system and the object. Additional information about the object, such as its rate or material composition, can also be determined by measuring certain characteristics of the reflected signal, including induced Doppler shift. Finally, by manipulating the emitted light, many different points in the environment can be measured to create a complete 3D model.
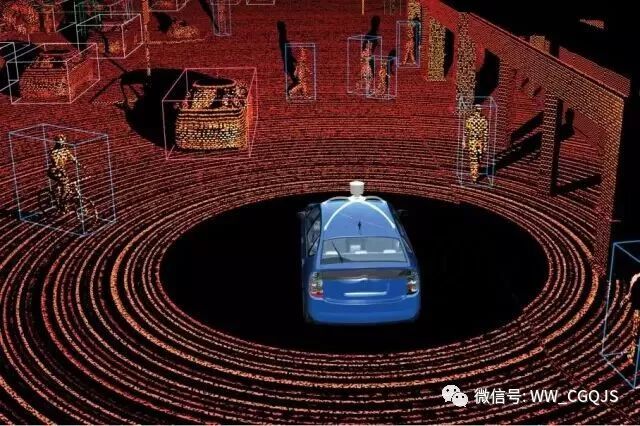
Lidar is similar to radar, but with higher resolution because the wavelength of light is about 100,000 times smaller than the wavelength of the radio. It can distinguish pedestrian and character posters in real movement, model in three-dimensional space, detect static objects, and accurately measure distance.
Lidar is a radar system that detects the target position and velocity by emitting a laser beam. It has the advantages of high measurement accuracy and good directionality, as follows:
1, with a very high resolution
Lidar works in the optical band, and the frequency is more than 2 to 3 orders of magnitude higher than microwave. Therefore, compared with microwave radar, laser radar has extremely high range resolution, angular resolution and speed resolution.
2, strong anti-interference ability
The laser has a short wavelength and can emit a laser beam with a very small divergence angle (on the order of μrad). The multipath effect is small (no directional emission is formed, and multipath effects are generated with microwave or millimeter waves), and low altitude/ultra low altitude targets can be detected;
3, the amount of information obtained is rich
The target distance, angle, reflection intensity, speed and other information can be directly obtained to generate a target multi-dimensional image;
4, can work all day
Laser active detection does not depend on external lighting conditions or the radiation characteristics of the target itself. It only needs to emit its own laser beam and acquire the target information by detecting the echo signal of the emitted laser beam.
However, the biggest drawback of Lidar is that it is easily affected by atmospheric conditions and the dust of the working environment. It is very difficult to achieve an all-weather working environment.
Principle and structure of lidar
Similar to the radar principle, the technology used by lidar is Time of Flight (TOF). Specifically, the relative distance between the target and himself is calculated based on the return time of the laser after encountering the obstacle. The laser beam can accurately measure the relative distance between the contour edge of the object in the field of view and the device. These contour information form a so-called point cloud and draw a 3D environment map with an accuracy of up to centimeter level, thus improving measurement accuracy.
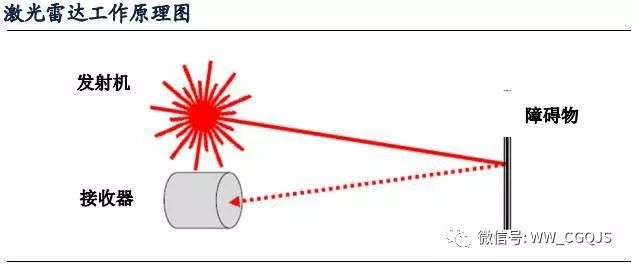
Imagine starting the stopwatch when a light pulse is emitted and then stopping the timer when the light pulse (reflected from the first object encountered) returns. The distance can be calculated by measuring the "time of flight" of the laser and knowing the speed at which the pulse travels. Light travels at a rate of 300,000 kilometers per second, so very high precision equipment is needed to generate data about distance.
In order to generate a complete point cloud, the sensor must be able to sample the entire environment very quickly. One way Lidar can do this is by using very high sample rates on a single transmitter/receiver. Each transmitter emits tens or hundreds of thousands of laser pulses per second. This means that up to 100,000 laser pulses complete the round trip from the transmitter on the laser unit to the object being measured in 1 second and return to the receiver on the lidar unit near the transmitter.
However, the fixed line is not enough to map the entire environment - it only gives very clear resolution in a very concentrated area. Therefore, many lidar systems use rotating components or rotating mirrors to make the line scan 360 degrees around the environment. A common strategy involves deflecting a single transmitter and receiver up or down to provide a larger field of view for the laser. For example, Velodyne's 64-line lidar system has a vertical viewing angle of 26.8 degrees (by rotation giving it a 360 degree horizontal viewing angle). This lidar can see the top of a 12-meter-high object from 50 meters away.
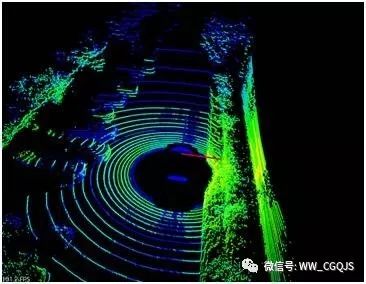
As you can see in the figure below, the distance from the lidar is different, and the degree of density of the point cloud is different, because the data fidelity decreases with distance. Although it is not perfect, higher resolutions can be used for closer objects because the angle between the emitters (eg, 2 degrees) increases the spacing between the dots as the distance to the sensor increases. .
In the ADAS system, the laser radar obtains characteristic data such as the position and moving speed of the target object based on the TOF time-of-flight principle through the lens, laser transmitting and receiving device and transmits it to the data processor; at the same time, the speed, acceleration, direction, etc. of the car The characteristic data will also be transmitted to the data processor through the CAN bus; the data processor comprehensively processes the information data of the target object and the vehicle itself and issues a corresponding passive warning command or active control command according to the processing result, thereby implementing the assisted driving function.
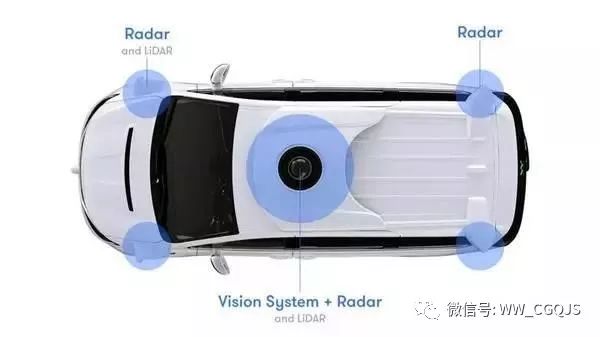
The picture below shows the layout of the lidar used by Google's driverless Waymo in the car:
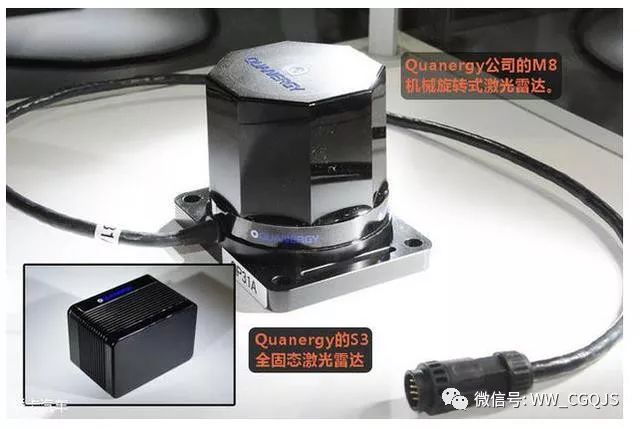
Lidars are classified by the presence or absence of mechanical rotating components, including mechanical lidars and solid-state lidars. Mechanical lidars have rotating parts that control the angle at which the laser emits light, while solid-state lidars rely on electronic components to control the angle of laser emission without the need for mechanical rotating parts.
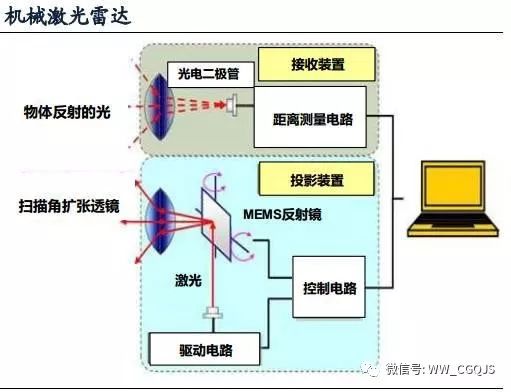
The mechanical laser radar consists of a photodiode, a MEMS mirror, a laser emission receiving device, etc., wherein the mechanical rotating component refers to a MEMS transmitting mirror in the figure that can control the laser emission angle by 360°.
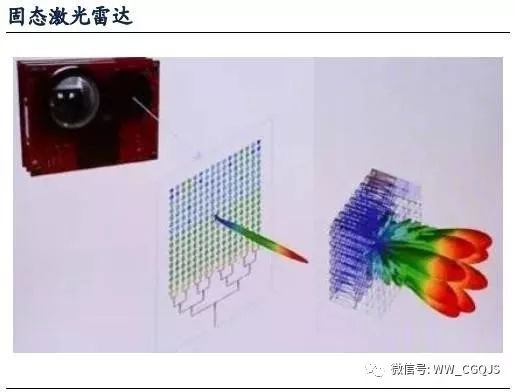
Unlike mechanical radar, solid-state laser radar replaces mechanical rotating parts with optical components such as optical phased arrays, photonic integrated circuits (Photonic ICs), and far field radiation patterns (Far Field Radiation Patterns) to achieve laser beam angle adjustment.
Optical phased array and microwave phased array are a principle that uses the coherent interference of light, and the phase difference occurs, and the interference peak appears. So how to make the phase difference of the light passing through the device is the focus of research, which requires finding suitable materials and excitation methods. The current excitation method is mainly electro-optic scanning, that is, the phase difference is caused by the electric power. Now the two are hot, one is an optical waveguide array, and the other is a MEMS device. The advantage of MEMS devices is that the scanning speed is fast, but it is not necessary, because the bottleneck is still at the scanning angle, so the commercial products of MEMS principle are still did not see.
The optical waveguide array realizes beam scanning by applying power, and uses the light wave conductive light effect to apply voltage to the waveguide core layer, so that each waveguide core layer has different additional refractive index, and the beam can have different light field in the waveguide array element output section. The additional phase difference, the phase difference is distributed according to a certain rule, which can cause the deflection of the output light speed. The output is distributed according to a certain phase by the phase difference, thereby realizing the scanning of the light beam.
Advantages of solid-state laser radar: fast response, low control voltage, large scanning angle and low price.
Due to differences in internal structure, the size of the two lidars is not the same. Mechanical laser radars are large in size, expensive, and relatively high in measurement accuracy, and are generally placed outside the car. Solid-state laser radars are small in size, cost-effective, and have relatively low measurement accuracy, but can be hidden in the car body without damaging the appearance.
According to the number of wire harnesses, laser radar can be divided into single-line laser radar and multi-line laser radar.
As the name suggests, single-line laser radar scans only produce one scan line at a time, and the data obtained is 2D data, so it is impossible to distinguish the 3D information about the target object. However, single-beam laser radar is widely used in security protection, terrain mapping and other fields due to its fast measurement speed and low data processing capacity.
The traditional lidar scanning field of view is very small. What if you want to observe 360 ​​degrees around? The most natural way is to do more lasers. The more lines you have, the more angles you cover.

Multi-line laser radar can produce multiple scan lines at a time. Currently, multi-wire products include 4-wire bundle, 8-wire bundle, 16-line bundle, 32-line bundle, and 64-line bundle. The subdivision can be divided into 2.5D laser radar and 3D laser radar. . The biggest difference between 2.5D lidar and 3D lidar is the range of vertical field of view of lidar. The vertical field of view of the former generally does not exceed 10°, while the latter can reach 30° or even 40°, which leads to the two for laser radar. The installation location requirements on the car vary.
Lidar parameter indexMeasurement distance, measurement accuracy, measurement rate, and angular resolution are several important indicators that determine the performance of 3D laser radar.

For example, in the application field of driverless cars, the detection distance of the laser radar is required. For example, on the highway, it is necessary to be able to detect the vehicle in front, and at the intersection, to be able to observe the car across the road.
Interestingly, the higher the accuracy, the better. The data obtained by the laser radar can be used for obstacle recognition, dynamic object detection and positioning. If the accuracy is too bad, the above purpose cannot be achieved; however, the accuracy is too good and there are problems, and the high precision puts great demands on the hardware of the laser radar. The amount will be very large and the cost will be very high. So the accuracy should be moderate.
Another point that can't be ignored is the angular resolution, which determines the distance between the two laser points after the shot. After the single-point ranging accuracy is reached, if the distance (point) between the two points on the surface of the object is too far, the accuracy of the ranging will lose its meaning.
Lidar opportunities and challengesopportunity
Lidar has many opportunities in the intelligent machine ecosystem. Compared to using 2D images, point clouds can be more easily used by computers to build a three-dimensional image of the physical environment. Two-dimensional images are the most easily understood data in the human brain, while for computers, point clouds are the most Easy to understand.
The 2D lidar scanner is designed for outdoor use and is designed for mobile, low power applications. It uses only nearly a quarter of the cost of competitors, which will bring new applications to this type of sensor (we have seen this in many other types of sensors). The 2D lidar can also be mounted on another rotating component to create a complete 3D point cloud in the environment.
Other companies are looking for other strategies to reduce system costs, such as Quanergy's solid state laser radar. The system is generally the same as the system already described above, however, unlike the use of rotating optics to move the beam, they use a "phased array optics" to direct the direction of the laser pulse, which can release one in a certain direction. The laser pulse, while letting the next pulse (after 1 microsecond) aim elsewhere in the field of view.
It is able to focus on objects that appear to be moving in the field of view in real time, which is an imitation of the human driver - the latter can notice the obstacles that are about to enter the road that the car is driving. The Quanergy system is designed to do this without mechanical movement and sample approximately 1 million data points per second - comparable to the speed of a 64-line rotary lidar, while significantly reducing costs. Another advantage is that it is easier to integrate on other automotive components such as mirrors and bumpers.
In addition, larger and more powerful systems are being developed that can image the ground from an airplane flying at a height of 30,000 feet with a resolution sufficient to see the vehicle on the ground. Although these systems have smaller market demands and higher costs, their development will continue to reduce the overall cost of sensor technology.
challenge
1, material
Since the lidar is based on the measurement of the time required to return the laser pulse to the sensor, a highly reflective surface can cause problems. Most materials look rough at the microscopic level and scatter light in all directions; a small fraction of this scattered light is returned to the sensor and is sufficient to generate distance data. However, if the surface reflectance is very high, the light will scatter away from the sensor, and the point cloud in this area will be incomplete.
2, the environment
The environment in the air can also affect the lidar readings. Records show that heavy fog and heavy rain can reduce the laser pulse emitted and affect the laser radar. To solve these problems, larger power lasers are in use, but it is not a good solution for smaller, mobile or power sensitive applications.
3, driving speed
Another challenge facing the lidar system is that the refresh rate during rotation is relatively slow. The refresh rate of the system is limited by the speed of rotation of complex optics. The fastest rotation rate of a lidar system is approximately 10 Hz, which limits the refresh rate of the data stream. When the sensor rotates, the car traveling at 60 mph travels 8.8 feet in 1/10 seconds, so the sensor is largely invisible to the changes that occur within 8.8 feet of the car during the drive. More importantly, the range covered by the lidar (in perfect conditions) is 100-120 meters, which is equivalent to less than 4.5 seconds of travel time for a car traveling at 60 mph.
4, the cost
Perhaps for laser radar, the high cost of equipment is the biggest challenge it needs to overcome. Although the cost has been greatly reduced since the technology was applied, it is still an important obstacle to its widespread adoption. For the mainstream automotive industry, a sensor worth $20,000 will not be accepted by the market. Elon Musk said: "I don't think it makes sense for the development of the car. I don't think it is necessary."
5, attribute recognition
Although we see lidar as a component of computer vision, point clouds are based entirely on geometry. Instead, the human eye recognizes other physical properties of the object, such as color and texture, in addition to shape. Today's lidar systems cannot distinguish between paper bags and rocks, and this should be a factor to consider when the sensor understands and tries to avoid obstacles.
6, hacker attack
The laser emitted by the laser radar itself is not coded. So the receiver itself has no way of identifying whether the light is emitted by its next-door transmitter or an interference signal. Hacking refers to the use of signals simulating vehicles and pedestrians, and feedback to the laser radar to create an attacking illusion of obstacles around it. Eventually the car will be forced to slow down or brake.
For laser radar manufacturers, it is possible to defend against hacker attacks from two angles: such as increasing the laser emission frequency and high-speed laser transmission frequency in a few microseconds, it is difficult for hacker's analog signal to choose when to transmit the interference signal for reception. Receiver. In addition, some errors are judged by the algorithm, and the interference data is filtered out by referring to the previous frequency data.

Lidar is just one of many sensors used to provide physical environment data to a computer, but the data generated is the easiest to understand for a computer, and it will also become cheaper. Velodyne sales and marketing director Wolfgang Juchmann said that the cost of laser radar has dropped 10 times in the past seven years. Thanks to the reduction in costs, we will continue to see new potential applications.
1U Patch Cord Rear,1U Patch Panel,1U Fiber Patch Panel,1U Patch Cord Rear Axle
Huizhou Fibercan Industrial Co.Ltd , https://www.fibercan-network.com