
Guide
In 1966, the famous writer Isaac Asimov published a famous science fiction novel "Dream Travel", which described the scientific method of reducing people to the size of cells and experiencing a dreamy adventure in the human body. This novel has inspired many scientists. Although it is difficult to reduce the number of real people to the size of a cell, it is entirely feasible to make a micro-robot instead of human beings to enter the body to complete the work. Therefore, micro-robots and software-based robots have always been hotspots in scientific research. We all expect robots to follow the command to reach the designated position of the human body, deliver drugs or remove diseased tissue with minimal harm to the human body. A few days ago, the famous British journal "Nature" released a magnetic control software robot developed by the German Max Planck Institute for Intelligent Systems. Perhaps it can provide new ideas for human research on micro-robots in vivo.
This is a rectangular parallelepiped robot 3.7 mm long, 1.5 mm wide and 185 microns thick. Don't underestimate the small square that looks dark on the outside. It can perform various specified actions like a mollusk under the control of a magnetic field. For example, swimming underwater or on the surface of the water, rolling in a circle, jumping over obstacles, crawling in a thin tube, flexibly switching various forms of motion, and so on.
The robot's main material is silica gel with magnetic NdFeB microparticles embedded in it. The particles have an average diameter of 5 microns. The robot surface is waterproof and can also be processed into biocompatible materials. The robot is previously set to a single-wavelength harmonic magnetic profile, which can change its shape under the control of a magnetic field that changes with time, and can generate different motion patterns depending on the terrain.
Because of the controllability of this robot, it can be loaded, transported and unloaded under human control, and can be applied to the transportation of human targeted drugs in the future.
This robot can be applied to different terrains in many ways. For example, when passing through a small space, it can generate waveform vibration like a caterpillar and climb in.
In the water, by changing the posture between the C shape and the V shape, learn to swim like a jellyfish. The robot can keep the C-shaped rotation away from the water surface when it is close to the shore. It is worth mentioning that its rolling performance is also the action when the caterpillars avoid the predator.

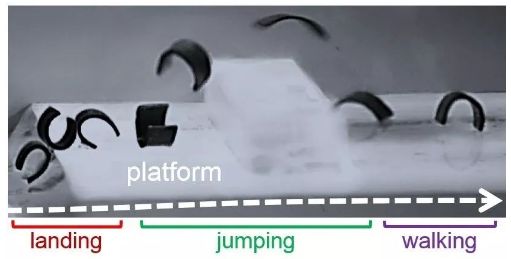
In addition, when encountering relatively high obstacles, you can also choose the way to jump. In short, in order to show the working ability of the software robot in various irregular environments, the researchers let the robot open a variety of motion modes to explore the amphibious scene and the human stomach model, and additionally complete the task of grasping objects and directional shifting. .
Interestingly, Xiaobian also unexpectedly harvested the general process of making this software robot from Mapu Intelligent Systems Research when he looked at the related information of this software robot. How do you say this process is like a lot of action when a girl prepares a powder mask. The process is as follows: Pour the appropriate amount of silica gel and NdFeB microparticles into a container, stir them evenly with a stir bar, and evenly spread them on a glass plate with a nominal thickness when it becomes a viscous paste. After the paste is dried, a laser-like tool is used to accurately cut the desired size.

After cutting, you can use the tweezers to remove the corresponding material.
Therefore, after reading the production process of the entity, you will find that the technical key of this robot does not seem to be how to make a robot in the physical sense, but how to precisely control the robot. What kind of magnetic field should be generated to control the robot to make corresponding actions? Xiaobian I also look forward to having a big god to explain it.
In short, a software robot that can move without any physical intervention in the human body is a good research direction for medical robots in the body, but the internal environment of the human body is extremely complicated. It is really a heavy responsibility to truly achieve the application level. Far away. However, this engineering paper can be included in "Nature", and the significance of its research can also be seen. Looking forward to the future science fiction novel "Dream Travel" can shine into reality and benefit mankind.
High Current Terminal Blocks,Panel Terminal Block,Feed Through Terminal Block,Heavy Power Terminal Block
Sichuan Xinlian electronic science and technology Company , https://www.sztmlchs.com