
The missile attitude control system is a complete set of devices for automatically stabilizing and controlling the movement of the missile around the centroid. Its function is to ensure the stable flight of the missile, and to control the missile to fly to the target according to the guidance command. The missile attitude control system consists of three parts: the sensitive device, the control computing device and the actuator. Sensitive devices (such as gyroscopes, accelerometers, etc.) measure changes in the attitude of the projectile and output signals. The control computing device (such as a computer) operates, corrects, and amplifies the respective attitude signals and the guidance commands according to a certain control law and outputs the control signals. The actuator (such as the steering gear) drives the rudder surface or oscillates the engine based on the control signal to generate a control torque that causes the missile to move around the centroid.
Missile control system definitionMissile atTItude control system A device that automatically stabilizes and controls the missile's movement around the center of mass. Its main function is: to stabilize the missile attitude under various interference conditions, to ensure that the missile's flight attitude angle deviation is within the allowable range; according to the guidance command, control the missile's attitude angle to adjust the missile's flight direction, correct the flight path, and make the missile accurate. Hit the target.
Because the missile control system involves many components, it is not only time-consuming but also costly from individual components to overall design, testing and adjustment. A model of missile requires a long period of time from design to finalization. How to reduce costs and shorten the cycle has always been a concern. Based on the accurate measurement of the transfer function of each component, the simulation analysis of the system has always been the preferred method. How to establish a high-precision and real-time control system model is the first problem that must be solved; the second problem is to design a controller to optimize the performance of the entire control system, which is the key to the design of the entire control system.
Traditionally, we have adopted C, FORTRAN and other high-level programming languages ​​to programmatically implement modeling. There are tens of thousands of programming statements. The debugging is complicated. Sometimes, the programmers themselves cannot understand the programs they have programmed. Use MAT- here
Modeling and simulation of LAB's Sinuiink software package. Use the transfer function module in Simuiink to connect the components to form the initial system model; since the order of the initial system model is too high to run, in order to improve the real-time performance of the system simulation, the model has a small impact on the overall performance. The origin dipole reduces the model and forms a simplified model. In order to design the control system with optimal dynamic performance and steady-state performance, the advanced correction with easy adjustment of parameters is used to form a controller in series with multiple phase lead correction components. The forward channel connecting the controller to the simplified model constitutes a practical operational system model, and the running data is sent to the working area for analysis, and the parameters of the controller are optimized by genetic algorithm to make the amplitude of the system The degree and phase margin are optimized, and the optimal controller is designed. The simulation results demonstrate the effectiveness of the method.
Establish an initial control system modelThe missile control system consists of measuring devices (attitude angle gyroscope, rate gyroscope, lateral accelerometer, normal accelerometer), amplifier, controller, engine and projectile. The transfer function of the engine and the projectile is of a high order. If the transfer function of the measured load is directly connected to the model, the system cannot be operated because the amount of calculation is too large. These systems can be downgraded by the following principles.
Set a system transfer function:

This means that if there is a zero point close to a pole (dipole), the proportion of the motion component corresponding to this pole will be small in the step response. This pole is "offset" by its very close zero.
In addition, if there is a pole in Gc that is very far from the origin, it means:
This indicates that the motion component corresponding to the pole far from the origin has little effect on the step response.
After analyzing the engine and the high-order system of the projectile, the poles and zeros that meet the above two conditions are ignored as secondary factors. Thus the two higher order systems are approximated by a lower order system. This way we build an initial control system model that can be run in real time.
Controller designThe design of the controller is the key to the design of the control system. Design controller
The best is to optimize the dynamic and steady-state performance of the control system. That is, the controller we are designing can make the system have reasonable amplitude margin and phase angle margin.
The amplitude margin can directly indicate how much the open-loop gain of the system can be increased without losing stability. However, the more important role of amplitude margin and phase margin is to tell people the stability margin of the system in the case of uncertain parameters (or structure), that is, the reliability of the judgment on system stability. These two indicators should be used together. However, the phase angle stability margin is often used more often in engineering practice.
In addition to indicating the nature of the system under uncertainty, the phase angle margin can also approximate the dynamics of a system under the action of a step signal. The stability margin of the system is too small, the step response is often severe, and the oscillation tendency is more serious. On the contrary, the stability margin is too large, and its dynamic response is often slow. Therefore, proper design of the system's phase angle margin and amplitude margin can make the control system have appropriate dynamic performance, while avoiding the harmful effects caused by the uncertainty of certain component parameters in the system. Engineering generally seeks to make the phase angle margin between 300 and 600, and the gain margin is 6 dB.
In order to adjust the phase angle margin and the amplitude margin more accurately, a plurality of phase lead correction components are used in series to form a controller.
The transfer function of the phase lead correction component is:
Select one phase lead component,
The parameters of each phase lead correction are obtained by genetic algorithm! . Genetic algorithm (GeneTIcAlgorithm, GA) is a global optimization algorithm developed in recent years. In the genetic algorithm, the variable is converted into the form of a string. The search process of the optimal solution is the process of character selection, inheritance and mutation in the string space. The process of transforming from the actual variable space to the string space is called encoding, and the reverse process is called decoding.
Genetic algorithm is a multi-point search technique. A set of search points is called a population, and one of them is called an individual. In the genetic algorithm, the operator who evaluates the superiority and inferiority of the individual in the population and selects according to its superiority and inferiority is called the evaluation and selection operator; the individuals in the selected population are randomly paired and paired into one Probability exchanges part of their chromosomes, ie, crossovers; the gene values ​​at one or several loci of the individual after the crossover are transformed with a certain probability, ie, mutated. A cycle through selection, intersection, and variation is called a generation. After several generations, some good features are saved, that is, the optimal variable values ​​are obtained. According to the above principle, we have written a genetic algorithm function program. It is suitable for all multivariable functions to find the maximum value problem (minimum value problem can be obtained by reciprocal). Because this programming is too complicated, it is not convenient to explain here. The key to controller design problems is to list their genetic algorithm optimization functions.
Make the phase angle margin around 45 degrees, while making the amplitude margin as large as possible. According to this principle, the optimization function is listed for the amplitude margin and the phase margin, and then the optimization function is input into the genetic algorithm program to find the optimal variable group.
The optimization function yGA of the genetic algorithm for this problem is:
Simulation only makes sense if it meets certain accuracy requirements. In order to improve the accuracy of the control system modeling, we first obtain the controller that guarantees the system with the optimal amplitude margin and phase angle margin by genetic algorithm; then, the gain compensation is removed by appropriate adjustment to remove the influence away from the origin dipole; The final model is consistent with the actual system; the simulated experimental data is consistent with the theoretical requirements.
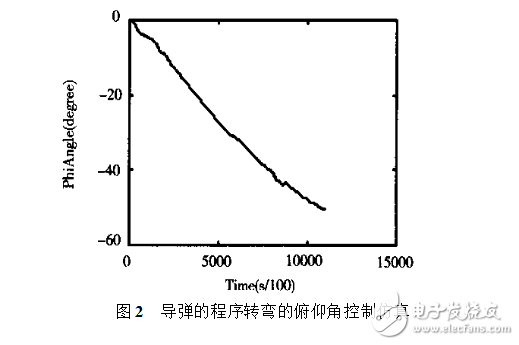
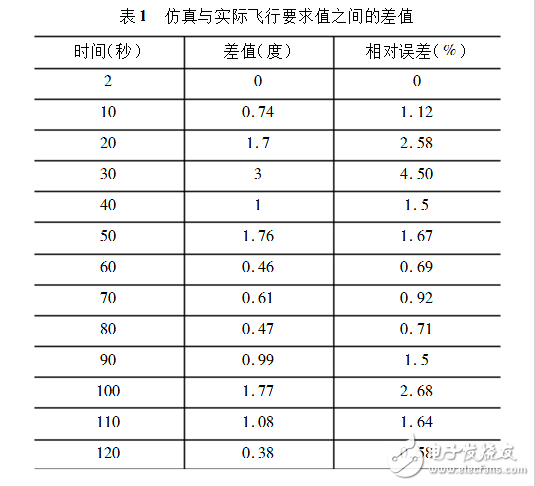
The main task of the attitude control system is to ensure that the missile can correct the missile to the correct attitude in real time when the missile is changed by the disturbance attitude. That is, the system has good dynamic performance and steady state performance, and the dynamic performance is due to the system phase angle. To ensure that the steady state performance is guaranteed by the amplitude margin and the phase margin. The controller designed by the above algorithm can ensure the system has good dynamic characteristics and steady state characteristics. The second task is to simulate the program's turning pitch angle at a particular time (feature seconds) consistent with the theoretical requirements. This is the two major tasks of the attitude control system. The accuracy of the simulation can be known by evaluating the simulation of the feature seconds. The simulated pitch angle (PhiangIe) is shown in Figure 2. Table 1 gives the difference between the simulation at the feature seconds and the actual flight demand value.
Real-time analysis of accuracy shows that the relative error of the difference between the simulated data of the characteristic seconds and the actual flight demand value is less than 5%, which meets the requirements of engineering accuracy. As the experimental data increases, the model is continually corrected, and the model will be more accurate, so that a more accurate transfer function of the projectile and the engine can be obtained.
In order to reduce the cost of missile control system design and improve the performance of attitude control system, a missile attitude control system model is established and a controller that guarantees the optimal phase margin and amplitude margin of the control system is designed. The model is reduced by omitting the dipole away from the origin and adjusting the amplification factor, which has less influence on the control system, to meet the requirements of real-time operation of the system model; in order to design a control system with optimal dynamic and static performance, select The phase advance correction is performed by using a plurality of phase lead correction components in series to form a controller, and a genetic algorithm optimization function is used to obtain a variable value that can ensure a phase angle margin of 45 degrees and an amplitude margin as large as possible. The parameters of the component ultimately design a controller that optimizes the amplitude margin and phase margin. Due to the nonlinear and time-varying characteristics of the projectile and the engine, the total flight time is divided into several time periods. Different controllers are designed for different time periods, and finally the amplitude margin of the whole system over the entire time period is The phase angle margin is optimal.
The simulation experiment proves that the error between the pitch angle and the theoretical value of each characteristic second program is less than 5%, which meets the requirements of engineering practice.
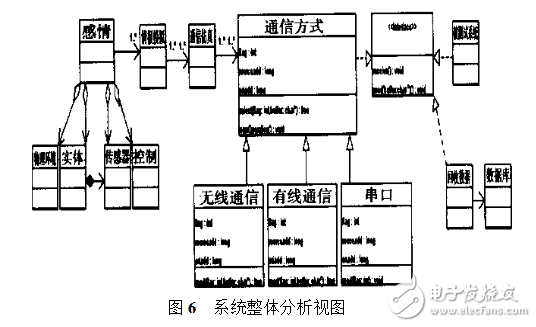
Become an urgent problem to solve. The test environment relies on experimental simulation technology, and applies the domain technology to the analysis and design of the simulation test environment domain model, and then derives the prototype of the system. At the same time, simulates the environment in which the system runs to simulate whether the prototype established by the test meets the requirements of the system, thereby exposing Problems with the C3I system.
The analysis and design of the C3I simulation test environment model is a controlled iterative process. The domain analysis is based on the use case and drives the iterative process through the architecture. The domain analysis is used in the C3I simulation test environment to provide a modeling method and guidance for solving the rapid prototyping problem of C3I system, which accelerates the development progress of the system, shortens the system development cycle, and saves the test cost. It also continually improves the functionality and performance of the system. The model of this test environment has been used to guide the development and integration of a C3I system.
5.1 Home Theater Speaker,Home Theatre 5.1,Wireless Surround Sound Speakers,Bluetooth Surround Sound System
GUANGZHOU SOWANGNY ELECTRONIC CO.,LTD , https://www.jerry-power.com