
Lidar and competing sensor technologies (cameras, radars, and ultrasound) reinforce the need for sensor fusion and place higher demands on careful selection of photodetectors, light sources, and MEMS galvanometers.
Advances in sensor technology, imaging, radar, light detection technology and ranging technology (lidar), electronics and artificial intelligence have enabled dozens of advanced driver assistance systems (ADAS), including collision avoidance, blind spot monitoring, Lane departure warning and parking assistance. Synchronous operation of these systems through sensor fusion allows fully self-driving vehicles to monitor the surrounding environment and warn drivers of potential road hazards, even taking evasive actions independent of the driver to prevent collisions.
Self-driving cars must also distinguish and recognize objects in front at high speeds. Through ranging technology, these self-driving cars must quickly build a three-dimensional (3D) map within a distance of about 100m and create high-angle resolution images up to 250m away. If the driver is not present, the vehicle's artificial intelligence must make the best decision.
One of the basic ways to accomplish this task is to measure the round-trip time (ToF) of the energy pulse from the self-driving vehicle to the target and back to the vehicle. When you know the speed of the "pulse" through the air, you can calculate the distance to the reflection point - the pulse can be ultrasonic (sonar), radio (radar) or light (laser).
Demonstration of the laser radar application of the Hamamatsu detector in the Western Photonics Exhibition
DEMO made using APD is the ToF method used.
Among the three ToF technologies, Lidar is the best choice for providing higher angle resolution images because it has smaller diffraction characteristics and beam divergence, which can identify adjacent objects better than microwave radar. This high angular resolution is especially important at high speeds, providing enough time to deal with potential hazards such as head-on collisions.
Laser source selection
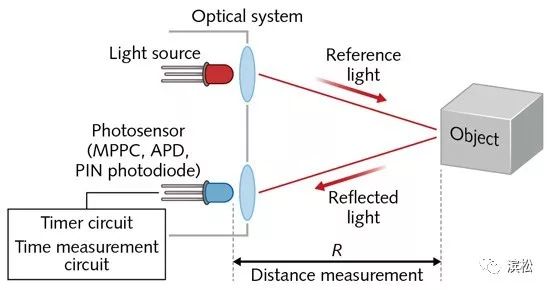
In the ToF laser radar, the laser emits a pulse of duration τ, which triggers the internal clock in the timing circuit at the instant of transmission (illustrated below). The light pulse reflected from the target reaches the photodetector, and the conversion produces an electrical signal output to stop the clock. This way of measuring the round-trip ToF Δt time can calculate the distance R to the reflection point.
If the laser and photodetector are actually in the same position, the distance is determined by the following formula:
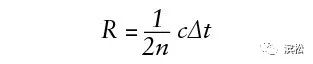
Medium c is the speed of light in vacuum, n is the refractive index of the propagation medium (about 1 for air), and there are two factors that affect the distance resolution ΔR: the uncertainty δΔt when measuring Δt and the space caused by the pulse width The error w(w = cτ).
The first factor represents the ranging resolution ΔR = 1/2 cδ Δτ, and the second represents the ranging resolution ΔR = 1/2 w = 1/2 cτ. If the distance is measured with a resolution of 5 cm, the above relationship means that δΔt is approximately 300 ps and τ is approximately 300 ps, ​​respectively.
Time-of-flight lidars require photodetectors and subsequent electronics systems to have very little time jitter (a major contributor to δΔτ) and pulsed lasers capable of emitting short pulse widths, such as relatively expensive picosecond lasers. The lasers in typical automotive Lidar systems currently produce pulses of about 4 ns duration, so reducing beam divergence is necessary.
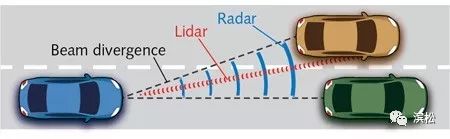
Beam divergence depends on the ratio of wavelength to transmit antenna size (microwave radar) or lens aperture size (lidar). The ratio of microwave radar is larger, so the divergence is larger and the angular resolution is lower. In the picture, the microwave radar (black) will not be able to distinguish between the two cars, while the lidar (red) can.
One of the most critical choices for automotive Lidar system designers is the wavelength of light. There are several factors that constrain this choice:
· Safety for human vision
· Propagation characteristics in the atmosphere
· Laser availability and availability of photodetectors
The two most popular wavelengths are 905 and 1550 nm. The main advantage of 905nm is that silicon absorbs photons at this wavelength, while silicon-based photodetectors are typically more indium gallium arsenide (InGaAs) near-infrared detectors than 1550 nm. Cheap.
It can be used in the self-driving laser radar of Hamamatsu NIR MPPC (silicon photomultiplier). It has high detection efficiency at 905nm, fast response speed and wide operating temperature range. It is suitable for Lidar applications in various occasions, especially Long distance measurement using TOF ranging method.
However, 1550nm human vision is more secure and can use a single pulse of larger radiant energy lasers – an important factor in wavelength selection.

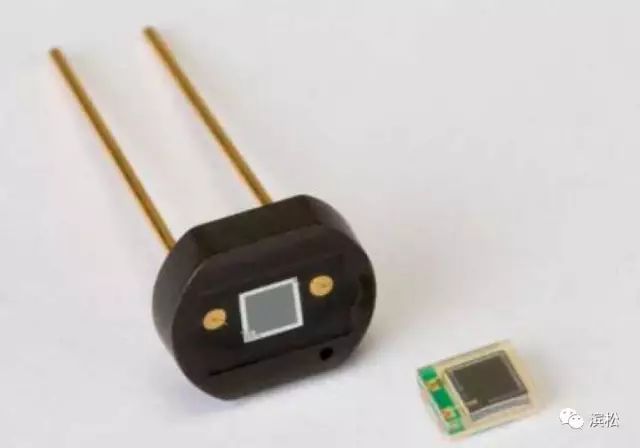
1550nm detector
Hamamatsu InGaAs APD G8931
Atmospheric attenuation (under all weather conditions), scattering of particles in the air, and reflectivity of the target surface are all wavelength dependent. Due to the wide variety of possible weather conditions and reflective surfaces, the choice of automotive laser radar wavelengths under these conditions is a complex issue. In most practical cases, the light loss at 905 nm is smaller because the absorption of water at 1550 nm is greater than at 905 nm. 1
Photodetector selection
Only a small fraction of the pulses emitted by the pulse can reach the active area of ​​the photodetector. If the atmospheric attenuation does not change along the pulse path, the laser beam divergence is negligible, the spot size is smaller than the target, the incident angle is perpendicular to the detector and the reflector is Lambertian (reflected in all directions), then the light receiving peak power P(R) )for:
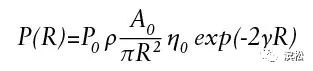
P0 is the peak power of the emitted laser pulse, Ï is the reflectance of the target, A0 is the receiver aperture area, η0 is the optical system transmittance, and γ is the atmospheric extinction coefficient.
This equation shows that as the distance R increases, the received power decreases rapidly. In order to reasonably select the parameters, R = 100 m, the number of photons returned on the active area of ​​the detector is about a few hundred to several thousand, and the photons normally emitted exceed 1012. These echo photons are detected simultaneously with the background photons, while the background photons do not have any useful information.
The narrow-band filter can reduce the background light reaching the detector, but it can't be reduced to zero. The influence of the background light reduces the detection dynamic range and increases the noise (background photon noise). It is worth noting that under typical conditions, the ground solar irradiance is less than 905 nm at 1550 nm.
The basic principle of time-of-flight (ToF) lidar
Creating a complete 3D map in a 360° × 20° area around a car requires a beam to be scanned after grating splitting, or multiple laser beam scans, or to cover the entire beam and collect it back. Point cloud data. The former is called a scanning laser radar, and the latter is called a flash laser radar.
There are several ways to scan a laser radar. The first way, in the case of Velodyne (San Jose, CA), is to install a lidar platform at the top that rotates at 300-900 rpm and emits 64 pulses of 905 nm laser. Each beam has a corresponding avalanche photodiode (APD) detector. A more similar method is to use a rotating polygon mirror with a slightly different tilt angle for each face to direct the reflection of a single pulsed beam with different azimuths and bevels. The mechanical moving parts in both designs have the risk of failure when the outside driving environment is bad.
Hamamatsu new 100-meter self-driving laser radar detector
16ch silicon APD S14137-01CR
The second, more compact scanning laser radar uses a miniature microelectromechanical system (MEMS) galvanometer to electrically direct one or more beams in a two-dimensional direction. Although there are still moving parts (oscillating mirrors) in technology, the amplitude of the oscillation is small and the frequency is high enough to prevent mechanical resonance between the MEMS galvanometer and the car. However, the geometry of the galvanometer limits its amplitude of oscillation, which makes the viewing angle limited—a drawback of the MEMS approach. However, this method has attracted people's attention due to its low cost and high achievability.
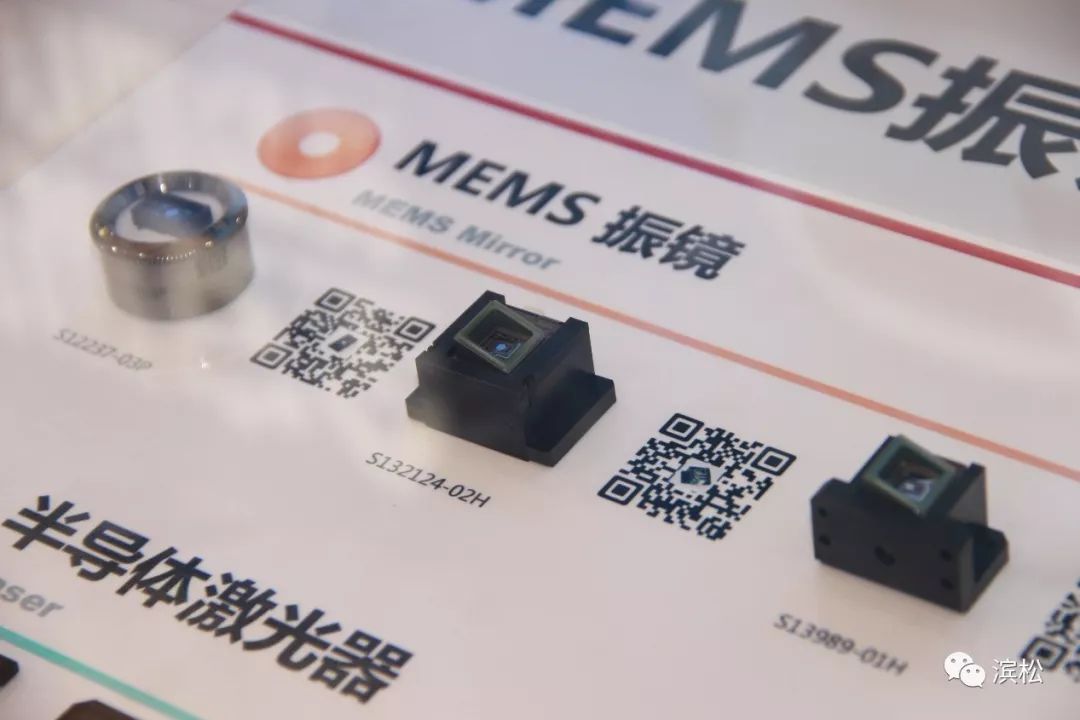
Hamamatsu's latest MEMS Mirror products
Just exhibited at the Shanghai Expo in Munich
Optical phased array (OPA) technology is the third competitive laser radar technology that is increasingly popular with reliable "fixed parts" designs. It consists of an array of optical antennas that are illuminated by coherent light. Beam steering is achieved by independently controlling the phase and amplitude of each unit's illumination, thereby interfering with the far field to produce the desired illumination direction, enabling single-beam to multi-beam variations. Unfortunately, the loss of light limits the range of available OPA components.
The flash lidar fills the target scene with light, and the illuminated area matches the field of view of the detector. The detector is an array of APDs on the optical focal plane of the probe. Each APD independently measures the ToF of the image feature on it. This is a true "no moving part" approach where the tangential direction (vertical, horizontal) resolution is limited by the size of the 2D detector pixel.
However, the main disadvantage of flash laser radar is the number of echo photons: once the distance exceeds tens of meters, the amount of returned light is too small to be reliably detected. If it is not directly covering all the detection environments with light but in the form of structured light (for example in the form of a lattice) and sacrificing a certain tangential resolution, the echo light intensity can be increased. In addition, vertical cavity surface emitting lasers (VCSELs) make it possible to simultaneously emit thousands of beams in different directions.
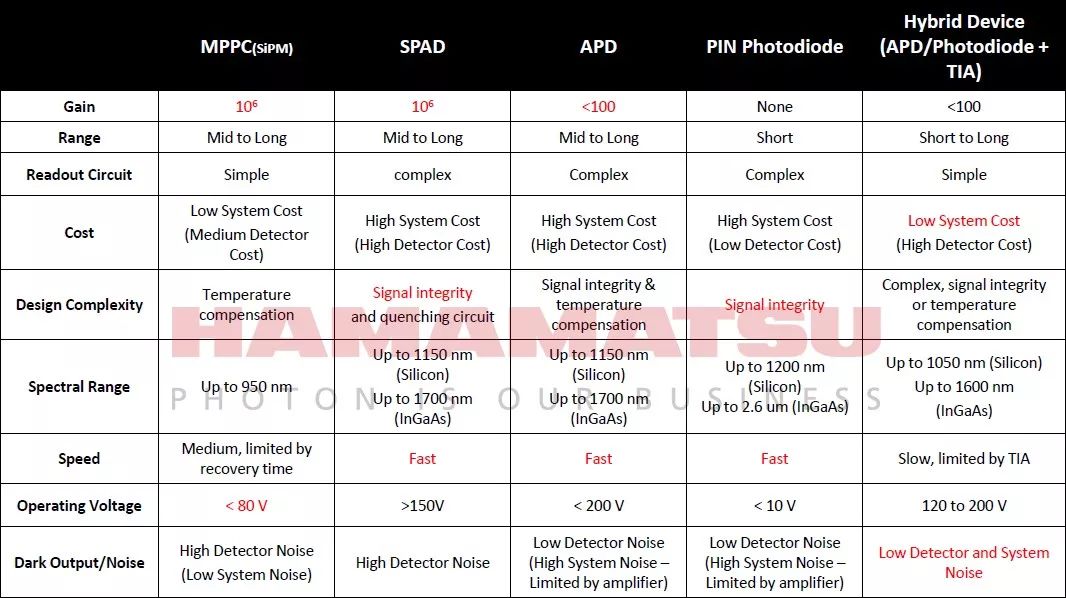
Hamamatsu's comparison of optical semiconductor detectors for lidar
Report: Introduction to Core Semiconductor Devices for Autopilot Lidar
Get rid of the limitations of the ToF method
The ToF laser radar is susceptible to noise due to its weak echo pulse and wide bandwidth of the electronic part of the detection part, while the threshold triggering produces a measurement error of Δt. Therefore, frequency modulated continuous wave (FMCW) laser radar is a very interesting alternative.
In an FMCW radar or a å•å•¾ modulated radar, an antenna continuously transmits radio waves whose frequencies are modulated. For example, linearly increasing from Æ’0 to Æ’max with time T, then linearly decreasing from Æ’max to Æ’0 as T decreases. If the wave is reflected back to the launch point on a moving object within a certain distance, its instantaneous frequency will be different from the radio wave emitted at that instant. This difference is caused by two factors: the distance to the object and its relative radial velocity. The frequency difference can be obtained by electronic measurement and the distance and velocity of the object can be calculated (see the figure below).
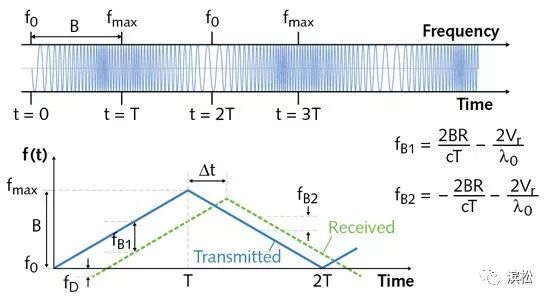
In the helium radar, the distance to the reflected target and its radial velocity can be determined by electronically measuring fB1 and fB2.
Inspired by the radar, the FMCW laser radar can be obtained in different ways. In the simplest design, one can adjust the light intensity of the illuminated target. This frequency is affected by the same law of the FMCW radar carrier frequency (eg Doppler effect), the returned light is detected by the photodetector and the modulation frequency is restored, the output is amplified and mixed with its own oscillation frequency to allow measurement of the frequency shift, From this, the distance of the target and its speed are calculated.
However, the FMCW laser radar has certain limitations. Compared with the ToF laser radar, it requires more computing power, so it is slower in generating full three-dimensional surround images, and the degree of linearity of measurement accuracy for chirp modulation. Very sensitive.
While designing a fully functional lidar system is challenging, these challenges are not insurmountable. As research continues, we are getting closer to the era when most cars are fully automated after production.
10K PCS Ready HOT OEM Ozone Generator in Car Air Purifier Mite Anti Virus Filter Sterilizer Disinfecting
Features:
O-zone & Anoin Two Mode --- This advanced air cleaner purifier with Anion and O-zone 2-in1 air sterili-zation mode to fresh air and kill harmful mold decompose smoke, odor and formaldehyde, Keep the air fresh!
Anoin Mode Powerful and Enviroment Friendly --- Releas 8million/cm3 Negtive Ion captures up the airborne particles(PM 2.5), pet odor, smoke, kill harmful mold and other harmful gases. No chemical composition and filter requied. Effectively improving the air quality and Prevent harmful substances inhaled into the lungs.
Car Air Purifier,Car Air Cleaner,Car Air Purifier Ionizer,Best Air Purifier For Car
Jiangmen soundrace electronics and technology co.,ltd. , https://www.soundracegroup.com