
The following figure shows a servo motor control circuit made of power operational amplifier LM675. The motor uses a DC servo motor. It can be seen from the figure that the power operational amplifier LM675 is powered by 15V, 15V is applied to the non-inverting input of the operational amplifier LM675 via RP1, and the output voltage of the LM675 is added to the input of the servomotor. The motor is equipped with a speed signal generator for detecting the speed of the motor in real time. Actually, a speed signal generator is a generator whose output voltage is proportional to the speed. The voltage output from the speed signal generator G is fed back to the inverting input of the operational amplifier as a speed error signal after the voltage divider circuit. The voltage value set by the speed command potentiometer RP1 is added to the non-inverting input of the operational amplifier after being divided by R1.R2, which is equivalent to the reference voltage.
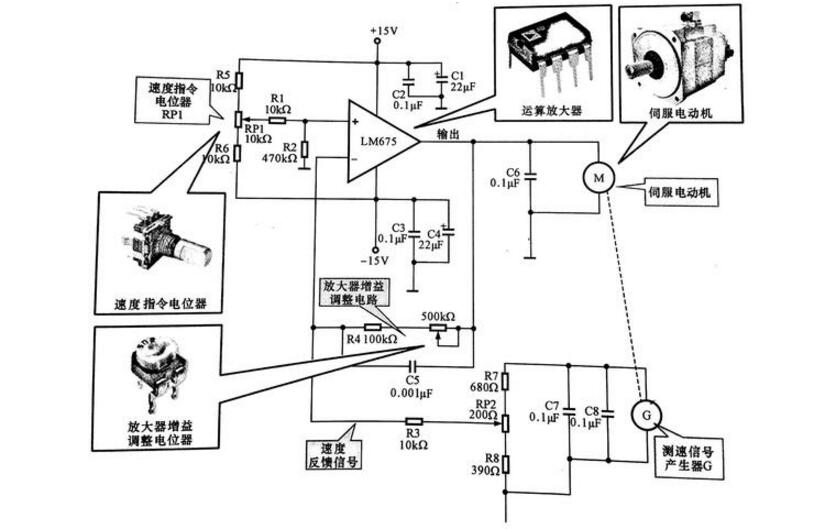
Servo motor control schematic
The servo motor is represented by the letter M as a servo motor and is a source of power for the drive system. Operational amplifier: It is expressed by the circuit name, namely LM675, which is the amplifier part in the servo control circuit and provides the drive current for the servo motor.
Speed ​​command potentiometer RP1: set the reference voltage of the operational amplifier in the circuit, ie the speed setting. Amplifier gain adjustment potentiometer RP2: used in the circuit to fine tune the amplifier's gain and speed feedback signal size, respectively. When the load of the motor fluctuates, the voltage fed back to the inverting input of the op amp also changes.
When the motivation load increases, the speed will decrease and the output voltage of the speed signal generator will also decrease, which will cause the voltage at the inverting input terminal of the operational amplifier to decrease. The difference between this voltage and the reference voltage increases, and the output voltage of the operational amplifier increases. Conversely, when the load becomes smaller and the motor speed increases, the output voltage of the speed signal generator rises, and the feedback voltage applied to the inverting input terminal of the operational amplifier increases, the difference between the voltage and the reference voltage decreases, and the output voltage of the operational amplifier decreases. This will cause the motor speed to decrease, allowing the speed to automatically stabilize at the set point.
Servo motor advantages1. Accuracy: Closed-loop control of position, speed, and torque is achieved; overstepping of the stepper motor is overcome;
2, speed: high speed performance, general rated speed can reach 2000 to 3,000 rpm;
3, adaptability: strong anti-overload capability, can withstand three times the rated torque load, especially for occasions with instantaneous load fluctuations and requests for quick start;
4, stable: low-speed operation is stable, low-speed operation does not produce a stepping operation similar to the stepper motor. Suitable for occasions with high speed response requirements;
5. Timeliness: The dynamic time of motor acceleration and deceleration is short, generally within tens of milliseconds;
6, comfort: fever and noise significantly reduced.
For each type of servo motor, there are rated torque, maximum torque and servo motor inertia in the specification items. There must be a correlation between the parameters of the servo motor and the load torque and the load inertia. The output torque of the servo motor should meet the load. The requirements of the movement conditions of the mechanism, such as the acceleration and the speed of the mechanism, the weight of the mechanism, the movement mode of the mechanism (horizontal and vertical rotation), etc. The movement conditions are not directly related to the output power of the servo motor, but the higher the output power of the general servo motor, the relative output rotation. The moment will also be higher.
Therefore, not only the weight of the mechanism will affect the selection of the servo motor, but also the movement conditions will change the choice of the servo motor. The greater the inertia, the greater the acceleration and deceleration torque. The shorter the acceleration and deceleration times, the greater the servo motor output torque. When using servo motor specifications, follow the steps below.
(1) Determine the requirements of the movement conditions of the load mechanism, that is, the acceleration/deceleration speed, the movement speed, the weight of the mechanism, and the movement mode of the mechanism.
(2) Calculate the load inertia of the mechanism by selecting the appropriate load inertia calculation formula according to the operating conditions.
(3) Select the appropriate spurious servo motor specification based on load inertia and servo motor inertia.
(4) Calculate the acceleration torque and deceleration torque by combining the servo motor inertia and load inertia of the primary selection.
(5) Calculate load torque based on load weight, configuration method, friction coefficient, and efficiency.
(6) The maximum output torque of the primary servo motor must be greater than the acceleration torque + load torque; if it does not meet the conditions, other models must be selected to verify and meet the requirements.
(7) The continuous instantaneous torque is calculated based on the load torque, acceleration torque, deceleration torque, and holding torque.
(8) The rated torque of the primary servo motor must be greater than the continuous momentary torque. For example, if it does not meet the conditions, it must be calculated and verified by other models until it meets the requirements.
(9) Complete the selection.

When choosing a servo motor, the first thing to consider is the choice of power. Generally should pay attention to the following two points:
1, if the motor power is too small. There will be a phenomenon of “small horse-drawn carts†that will cause long-term overload of the motor, causing its insulation to be damaged due to heat, and even the motor will be burned.
2, if the motor power is too large. There will be "big horse-drawn cars" phenomenon, the output of its mechanical power can not be fully utilized, power factor and efficiency are not high, not only adverse to the user and the power grid. And it also causes a waste of electrical energy.
In other words, the motor power can neither be too large nor too small. To properly select the power of the motor, it must be calculated or compared as follows:
P=:F*V/100
(where P is the calculated power, the unit is KW, F is the required tension, the unit is N, V ​​is the working machine line speed m/s)
In addition. The most common is to use analogy to select the power of the motor. The so-called analogy method is to compare the power of motors used in similar production machinery.
The specific approach is to understand how much power is used by a similar production machine in this unit or other nearby units, and then select a motor with similar power for the test run. The purpose of the test run is to verify that the selected motor matches the production machine.
The method of verification is to make the motor drive the production machine to run, measure the operating current of the motor with a clamp ammeter, and compare the measured current with the rated current marked on the nameplate of the motor.
If the actual working current of the electric power machine is not much different from the rated current marked on the Ming spleen, the power of the selected motor is appropriate.
If the actual operating current of the motor is less than 70% of the rated current marked on the nameplate. It indicates that the power of the motor has been selected too large and the motor with smaller power should be replaced.
If the measured operating current of the motor is more than 40% larger than the rated current marked on the nameplate. It shows that the power of the motor is too small, and the motor with larger power should be replaced.
Actually, torque (torque), motor power and torque calculation formulas should be considered.
That is T=9550P/n
In the formula:
P power, kW; n rated speed of a motor, r/min; T a torque, Nm.
The output torque of the motor must be greater than the required torque of the working machine. Generally a safety factor is required.
Mechanical power formula: P=T*N/97500
P: power unit W; T: torque, unit g/cm; N: speed, unit r/min.

1. Some systems such as conveyors, lifts, etc. require the servo motor to be stopped as quickly as possible. However, the servo does not have regenerative braking in the event of a fault, emergency stop, or power failure and cannot slow down the motor. At the same time, the mechanical inertia of the system is large. At this time, the dynamic brake must be selected based on the weight of the load and the working speed of the motor.
2. Some systems need to maintain the rest position of the mechanical device, which requires the motor to provide a larger output torque and a longer stop time. If the self-locking function of the servo is used, the motor may overheat or the amplifier may be overloaded. In this case, the motor with electromagnetic brake must be selected.
3. Some servo drives have a built-in regenerative braking unit, but when the regenerative braking is more frequent, it may cause the DC bus voltage to be too high. At this time, a regenerative braking resistor must be provided. Whether the regenerative braking resistor needs to be reprovisioned or not, please refer to the instruction of the corresponding sample for matching.
4. If a servo motor with electromagnetic brake is selected, the motor's moment of inertia will increase, and the torque must be considered when calculating the torque.
The universal leather case with the protect function , and you could put the card slots ,it more convient you life .It could fit all phone size , Like S, M and L size (4.7-5.5).We sell Pu/genunine Leather phone case,Card Slot Phone Case,folio Phone Case, Leather Mobile Phone Cover,Universal Leather Case.


We employ the most creative designers and tech brilliant engineers to make the best cases. We believe our high-quality products with competitive prices will satisfy your needs.
The productive process :
Make the Products Mould –Cutting the fabric –Do the half products – Finish products – Cleaning –QC- Package – Shi
Phone Cover,Universal Leather Case,Universal Phone Case,Universal Cell Phone Case
Ysure Leather case 24/7 Support : 86 13430343455 , https://www.ysurecase.com